Архив автора
Берем MATLAB за Simulink. Самая простая модель системы управления
Пора брать быка за рога. Моделировать простые системы управления в MATLAB весьма просто и удобно.
Далее приводится разработка системы управления положением тележки, которая рассматривается как материальная точка.
Для начала необходимо создать модель системы управления в Matlab Simulink. Например, такую модель, какая получилась у меня. Она показана на рисунке 1.

Рисунок 1. Модель системы управления в Matlab Simulink.
Статья о том как построить модель любого или почти любого электрического мотора

Картинка из ЮТ №3, 1984
Как работает электрический мотор, я и сам до конца не понимаю. Но самую простую модель объяснить попробую, практически на пальцах.
На рисунке 1 я попробовал проиллюстрировать принцип действия электрического мотора. Красным и синим нарисован магнит, а штрихпунктирном – магнитное поле, которое он создает. В поле действия магнита вращается электромагнит – “якорь”. Напряжение на электромагнит поступает через контакты. Те, которые неподвижные – это «щетки», другие крутятся вместе с электромагнитом. Вся эта система контактов называется «коллектор».

Рисунок 1. Самая простая модель двигателя постоянного тока
Расположение контактов коллектора подобрано так, что бы подаваемое напряжение побуждало якорь постоянно поворачиваться в поле постоянного магнита (как стрелку в компасе) . В тот момент, когда магнитные поля постоянного магнита и якоря приходят в “согласие”, коллектор переключает напряжение на обратное. Ток в катушке электромагнита начинает течь в другую сторону- якорь продолжает вращаться.
Как я уже говорил, происходящие процессы имеют очень сложную природу. Особенно в момент переключения контактов коллектора, когда происходит полный разрыв цепи. При этом накопленная в электромагните энергия не теряется, а чудным образом возвращается обратно в электромагнит после восстановления цепи. Я полагаю, что все дело в ЭДС самоиндукции, которое “заряжает” контактную пару (в этот момент она работает как конденсатор) до очень высокого напряжения, которое после переключения “разгоняет” ток в электромагните практически до прежнего уровня. Часть энергии конечно же теряется- она рассеивается в тепло через электрическую дугу (искорки на коллекторе- это она и есть).
Элегантный компромисс с источником энергии. Широтно-импульсная модуляция (ШИМ).
 В кибернетике меня больше всего занимают систем управления электрическими моторами. Вот по душе мне это дело. Как, впрочем, и все инженерное ремесло, но электропривод – особенно. Пожалуй, каждый разработчик электроприводов сталкивался с проблемой передачи энергии от источника питания к мотору. Вот допустим, нам необходимо регулировать скорость вращения двигателя, а для этого надо подавать на него разное напряжение. То есть необходим управляемый источник напряжения. Однако, источник энергии у нас – это либо аккумулятор, либо электросеть с выпрямителем – источники постоянного напряжения.
В кибернетике меня больше всего занимают систем управления электрическими моторами. Вот по душе мне это дело. Как, впрочем, и все инженерное ремесло, но электропривод – особенно. Пожалуй, каждый разработчик электроприводов сталкивался с проблемой передачи энергии от источника питания к мотору. Вот допустим, нам необходимо регулировать скорость вращения двигателя, а для этого надо подавать на него разное напряжение. То есть необходим управляемый источник напряжения. Однако, источник энергии у нас – это либо аккумулятор, либо электросеть с выпрямителем – источники постоянного напряжения.
Вообще существуют непрерывные «линейные» источник питания, но все они работают сродни реостату – чтобы понизить потребляемую мощность двигателя, лишнюю энергию источника питания рассеивают в тепло. И этому, не пригодному для нас подходу, существует только одна альтернатива – силовые ключи. Эти электротехнические изделия имеют только два состояния: «включен» – электрическая цепь замкнута и «выключен» – электрическая цепь разомкнута. На базе четырех таких ключей можно собрать «мост», который имеет уже 3 состояния – «максимальное положительное напряжения», «максимальное отрицательное напряжение» и «ноль напряжения». Есть еще четвертое состояние – «короткое замыкание». Но оно уже не штатное, использовать его мы не будем, но помнить о нем необходимо всегда. Это и есть реализация «реле».
Semper in moto. Влияние дискретизации по времени на работу релейной системы управления
Система дискретная по времени система с релейным регулятором – это кошмар инженера и все тут. Впрочем по-порядку.
Я так понимаю, у читателя немедленно возникает вопрос: «А зачем вообще нужны такие системы управления?». Мое же мнение такое: это неизбежная, думаю что фундаментальна необходимость. Чем изящнее механическое, электротехническое и любое другое изделие, тем больше вероятность того, что одновременно начнут проявлять себя различного рода «ступеньки»: дискретизация сигналов по времени, по уровню, скачкообразное изменение движущих сил и так далее. Именно поэтому я считаю, что исследование этих процессов является очень важным этапом в изучении систем автоматического управления. Особенно полезным эти знания будут для тех из вас, кто собирается свой привод создать «самым быстрым», «самым точным», «самым надежным».
Введение. Теория автоматического управления начинается с эксперимента.
Однажды мой хороший знакомый, накануне своего отъезда в Корею, подарил мне на память замечательный самодельный стенд с двигателем постоянного тока, управлять которым можно прямо с компьютера. На рисунке показаны основные элементы этого стенда. Угол поворота вала двигателя измеряется импровизированным импульсным датчиком, который представляет собой крыльчатку, установленную на вал мотора, а так же пары фотодатчиков, посылающих сигналы об очередном прохождении лопасти крыльчатки прямо на микроконтроллер. Импульсы суммируются, а результат отсылается на компьютер через стандартный последовательный порт. Через этот же интерфейс микроконтроллер получает команды с компьютера и через простейший силовой преобразователь подает импульсы напряжения заданной длины на моторчик.
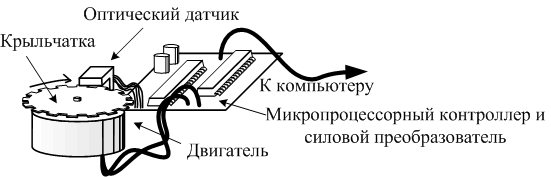
Рисунок 1. Испытательный стенд с двигателем постоянного тока.
С этим простым устройством я провел просто огромное количество экспериментов. Потом были и другие, более совершенные и современные лабораторные установки и промышленные изделия, более глубокие и сложные опыты, однако все теории и идеи, о которых будет рассказываться дальше, были проверены и «обкатаны» на этом простом устройстве.
Несомненно, что популярное ныне компьютерное моделирование может укрепить и обобщить знания, полученные из разных источников. Однако, по настоящему, проверить свое понимание, выявить, осознать и интуитивно прочувствовать бесчисленные нюансы, позволяет только физический эксперимент. Поэтому конструируйте, пробуйте, экспериментируйте. Я же попытаюсь далее изложить результаты своих экспериментов и наблюдений. Я постараюсь не выходить в своем рассказе за пределы школьного курса механики и алгебры, однако без дифференциальных уравнений первого и второго порядка обойтись не удалось, впрочем кое-что разъяснится по ходу дела, заранее не пугайтесь. Как говориться, не боги горшки обжигают. Итак, приступим.
“Раз ступенька, два ступенька”. Дискретизация сигналов по времени
Посветить вам на ступеньки?- Нет, спасибо, я уже лежу внизу.
Дискретные системы – это целая наука. Причем наука суровая и беспощадная. Чего стоит одно дискретное преобразование. Каждый раз, когда я, собственной персоной, начинаю изучать этот предмет (признаюсь, каждый раз приходится начинать сначала), прихожу в совершенно искренний ужас. Один переход из аналогового сигнала в дискретный вид чего стоит. При этом совершенно реальный сигнал, который можно измерить, увидеть на осциллографе, в конце концов, нарисовать на бумаге, превращается в трудно осознаваемую последовательность делта-импульсов.
Дельта-мпульс – это такой сигнал, площадь которого не ноль, но длительность нулевая и амплитуда бесконечна. Предположите, что такие импульсы идут один за другим, с определенной периодичностью. Время между импульсами называют «период квантования». Так наливаем кофе, переводим дыхание и готовимся к продолжению. Пока пьете кофе – посмотрите на картинки, которые, возможно, что-либо прояснят.
Электропривод повышенной комфортности. Работа релейного управления в идеальных условиях.

Комфорт – (англ. comfort). Комплекс максимально благоприятных для субъекта условий внешней и внутренней среды, включающий и факторы психологические. В состоянии К. отмечается отсутствие напряжения психических и физиологических функций организма. В значительной мере чувство К. зависит от состояния гомеостаза. О субъективных ощущениях, присущих состоянию К., говорят как о чувстве К. (Определение из медицинского словаря).
Вот надо же, а я комфорт воспринимал совсем не так. Допустим, жесткий цейтнот в условиях, приближенных к «боевым»: с дымом и копотью, кипящим мозгом и плавящейся проводкой. Но, если, при всем, при этом, работа доставляет неимоверное удовольствие – комфорт это или нет? Вообще, скользкий термин, неопределенный. Вот, лично для меня, комфорт наступает тогда, когда я, собственной персоной, («О чудо!») на самом деле начинаю управлять своим замечательным изделием, а не наоборот. «Отсутствие напряжения психических и физиологических функций организма» – пожалуйста, будьте, как говорится, любезны – все по словарю, по определению.
А вообще интересно, как бы мы распорядились «максимально благоприятными для субъекта условиями внешней и внутренней среды». Попробуем представить, что на самом деле работаем в «тепличных условиях», идеальность которых нарушает только необходимость
перейти к академическому тону – все-таки серьезный дальше пойдет разговор, вы понимаете, о чем я.
Первые шаги в электропривод
Мы уже рассмотрели в предыдущих главах, как должна двигаться тележка в идеальных условиях и получили эталон, который позволяет нам, обосновано судить об эффективности применяемого алгоритма управления. Теперь наступила пора перейти к более сложной задаче – управлению тележкой с неидеальным приводом. Для этого, как обещал ранее, рассмотрим один из простых примеров – тележку с электроприводом постоянного тока.
На рисунке 1 представлен один из вариантов управляемой тележки. Особенности ее конструкция ясны из картинки, отмечу только, что тахогенератор, зубчатоременная передача, а так же оптический датчик перемещения еще сыграют свою роль, как то Чеховское ружье, висящее на стене в первом акте.
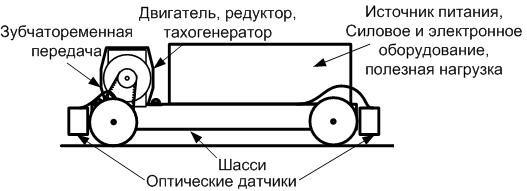
Рисунок 1. Тележка с электроприводом.
Где начинается кибернетика
• Играет поп с двумя гусарами в преферанс. Поп играет восьмерную и садится без лапы.
– Но как же так, – восклицает поп, – у меня же на руках было восемь козырей!
– Расклад батенька, расклад.
 И в правду, по студенческим воспоминаниям, пренеприятная ситуация. Впрочем, какого либо особенного цимеса в этой аллегории я не намечал. Просто решил немного развлечь себя и читателя накануне продолжительного разговора о том, как «все плохо». И, в правду, расстраиваться есть о чем. Иногда бывают такие расклады, о последствиях которых и не задумывался, пока редуктора испытуемого манипулятора не начинали издавать душераздирающий хруст с дальнейшим разлетом шестеренок и уничтожением имущества. Может я несколько и преувеличил, однако упомянутый рабочий момент стоит вашего пристального внимания.
И в правду, по студенческим воспоминаниям, пренеприятная ситуация. Впрочем, какого либо особенного цимеса в этой аллегории я не намечал. Просто решил немного развлечь себя и читателя накануне продолжительного разговора о том, как «все плохо». И, в правду, расстраиваться есть о чем. Иногда бывают такие расклады, о последствиях которых и не задумывался, пока редуктора испытуемого манипулятора не начинали издавать душераздирающий хруст с дальнейшим разлетом шестеренок и уничтожением имущества. Может я несколько и преувеличил, однако упомянутый рабочий момент стоит вашего пристального внимания.
Одно время я принимал посильное участие в настройке электропривода робота Пума. Привод каждого звена был тщательно налажен и отработан во всех мысленных и, как казалось мне, не мысленных режимах с учетом перегрузок и взаимного механического влияния. Однако, время от времени, в процессе одновременной работы нескольких звеньев пума начинала вести себя так, как будто бы вес звеньев робота резко и многократно увеличивался со всеми вытекающими «зубодробящими» последствиями. Забегая вперед, скажу, после некоторого раздумья мне удалось выяснить, что причина в источнике питания, который не «вытягивал» законных 20 ампер. Поэтому, при одновременном разгоне-торможении нескольких звеньев, силовые преобразователи приводов начинали демонстрировать электротехнические фокусы, описание которых заняло бы не одну страницу.
Кстати, об электроприводе постоянного тока. Вы наверное думаете, что он давно уже изучен и описан «вдоль, поперек и по-диагонали»? Так вот я с вами не согласен. Я вам со всей ответственностью заявляю – живой эксперимент всегда выявляет много тонкостей совершенно различной природы, как раз на стыке многих наук. Поэтому спецы – что механики, что электротехники, зачастую, приходят в полное недоумение от тех чудес, которые начинают демонстрировать их детища. Вот тут и приходит на помощь эта самая кибернетика.
Кибернетика начинается там, где светлые умы начинают искать общий язык. Лично я воспринимаю эту науку именно так. А то, что по ходу дела рождаются разумные машины, так это для меня само собой разумеющееся – о чем как не о них задуматься умному человеку?
А искать взаимопонимание, конечно, надо начинать с простых вещей. Поэтому оставим на некоторое время многозвенный манипулятор и вернемся к уже известному вам простому объекту управления – тележке с приводом.
Берем MATLAB за Simulink<< Оглавление >>Первые шаги в электропривод