Лиха беда начало. Самый простой объект управления.
Сначала у меня было желание начать свое повествование с экскурса в теорию линейных систем автоматического управления. Вот я беру учебник, например «» и… Я представляю, как начинает рыдать над этим учебником третьекурсник, например, Военмеха. Сплошные формулы, обобщения, матрицы, модели чего такого и все это, как правило, накануне экзамена.
Конечно, мне очень нравиться эта стройная теория, я ее очень люблю, но не использую. Потому что для простых систем управления эта теория практически бесполезна. Я даже смею утверждать, что ее изучение, без предварительной экспериментальной подготовки вредна для юных неокрепших умов, так как вносит диссонанс между изучаемой теорией и наблюдаемой действительностью . Но это мое личное мнение.
Однако же с чего то начинать надо, поэтому вспоминаем седьмой класс школы по физике с того места, где встречается термин «материальная точка». Второй закон Ньютона как раз про нее. А что бы вспоминалось побыстрей решим следующую задачу - попробуем, например, разработать систему управления для тележки, снабженную приводом, который создает тягу- силу, которая может либо разгонять, либо тормозить тележку.
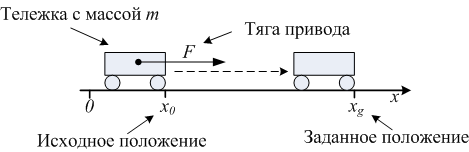
Рисунок 2. Иллюстрация к задаче автоматического управления тележкой
Уточним и формализуем поставленную задачу. И так будем считать, что наша тележка двигается строго по горизонтальной прямой, как это показано на рисунке 2, и ее положение определяется координатой 



Тяга привода 


Задачу управления сформулируем следующим образом: необходимо обеспечить такую тягу привода , что бы тележка максимально быстро переместилась из исходного положения
Тут следует обратить внимание на наиважнейший нюанс («до свидания теория линейного управления») ТЯГА ПРИВОДА ОГРАНИЧЕНА. То есть привод не может толкать нашу тележку, с какой угодно большой силой. Наверно ни кто не будет спорить, что подобного рода ограничение будет справедливо для привода любой природы, будь то электроника, гидравлика, механика или пневматика. И для наномоторов неизвестной мне природы это будет то же справедливо (наверное).
Математическая модель, описывающая физический закон движения нашей тележки, действующие в рамках указанных допущений будет выглядеть следующим образом: 
Этот закон называется, как вы наверное уже вспомнили- второй закон Ньютона. Как закон звучит в оригинале я и сам не помню, однако смысл его состоит в том, что ускорение материальной точки пропорционально сумме всех действующих на нее сил и обратно пропорционально массе. Напомню, что две точки над переменной 
Если выражение «вторая производная», пока что (или уже), мало о чем вам говорит, то, наверное, лучше остановиться на прочтении этой главы и полистать учебник по алгебре или в каком ни будь интернетовском поисковике наберите «производная для школьников». Лично я рекомендую школьный видеокурс на сайте «http://teachpro.ru». Там же освежите в памяти курс по интегралам, потому что именно через интегралы мы запишем закон движения нашей тележки:
=\dot{x}_0+\int_{0}^{t}{\ddot{x}(\tau)d\tau}")
=x_0+\int_{0}^{t}{\dot{x}(\tau)d\tau}")
Эти формулы показывают, какую величину примут координата и ее производная в момент времени 

")
Теперь осталось сделать следующий шаг, а именно нарисовать СТРУКТУРНУЮ СХЕМУ, представляющую динамику нашей тележки. Структурная схема реализует принцип «лучше один раз увидеть» и позволяет легко осознать, освоить и запомнить главные особенности физических законов, лежащих в основе движения тележки и системы ее управления.
Принцип построения структурной схемы весьма прост. Каждый блок структурной схемы описывает некоторое преобразование одной величины в другую. Например блок «коэффициент усиления» (Gain, как это показано на рисунке 3 , может описать соотношение силы, действующей на тележку и ее ускорение.
| |
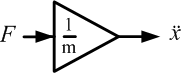 |
Рисунок 3. Элемент структурной схемы- коэффициент усиления.
Мы знаем, что скорость есть интеграл ускорения, на структурной схеме это будет выглядеть так, как показано на рисунке 4.
| |
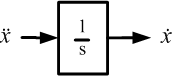 |
Рисунок 4. Элемент структурной схемы- интегратор.
Вы наверное обратили внимание, что блок, обозначающий интегрирование входной величины обозначен через ОПЕРАТОР ЛАПЛАСА 



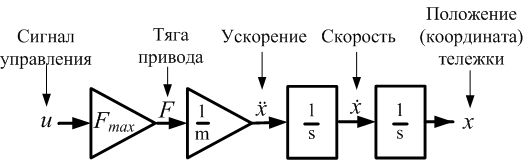
Рисунок 5. Структурная схема динамики тележки.
Обратите внимание, что в структурной схеме появилась еще одна величина  , которая называется «сигнал управления». Этот сигнал является безразмерным и изменяется в диапазоне от -1 до 1. Сила, прикладываемая к тележке зависит от этого сигнала следующим образом:
, которая называется «сигнал управления». Этот сигнал является безразмерным и изменяется в диапазоне от -1 до 1. Сила, прикладываемая к тележке зависит от этого сигнала следующим образом:
:=F_{max}u(t)")
")
Ввел же этот новый сигнал, я только для того, чтобы в дальнейшем было проще перейти к аналогичному управлению объектами произвольной природы.
На этом знакомство с простым объектом управления можно считать состоявшимся и пора приступить к разработке системы автоматического регулирования, о чем пойдет речь в следующей статье, которая так и называется “Из чего состоит система управления“.
Введение<< Оглавление >>Из чего состоит система управления
Я понимаю, что задача написать “ТАУ для чайников” не стояла, но если эта глава начинает погружение в теорию, то она слишком скомканная получилась.
Перечитай Перельмана (Якова Исидоровича) “Занимательная …” (математика, физика и т.д.). Мне нравится его подход: мягко и ненавязчиво вводит читателя в самые научные дебри.
Писать для детишек я еще не умею. Многие вещи здесь для меня самоочевидные, со всеми вытекающими:) По честному , я даже не понимаю как навязчиво и мягко рассказать взрослым людям об математической модели тележки.
А на самом деле это материал для третьего курса Военмеха.
Критика есть, жду теперь cоветов;))
Здравствуйте!
Занимаюсь программированием климатических камер.
Регулировка температуры и влаги не слишком отличается от управления тележкой, поэтому ваша книга оказалась как нельзя кстати.
Давно хотелось разобраться в пид регуляторах, и написать свой (может даже с автоподстройкой), надеюсь ваша книга мне в этом поможет.
В скором времени я обязательно напишу про дискретный ПД регулятор. А вот к ПИД регуляторам у меня свой подход, аналогичный адаптивным системам с сигнальной самонастройкой. Об этом тоже скоро напишу