Записи с меткой «электропривод»
Электропривод повышенной комфортности. Работа релейного управления в идеальных условиях.

Комфорт – (англ. comfort). Комплекс максимально благоприятных для субъекта условий внешней и внутренней среды, включающий и факторы психологические. В состоянии К. отмечается отсутствие напряжения психических и физиологических функций организма. В значительной мере чувство К. зависит от состояния гомеостаза. О субъективных ощущениях, присущих состоянию К., говорят как о чувстве К. (Определение из медицинского словаря).
Вот надо же, а я комфорт воспринимал совсем не так. Допустим, жесткий цейтнот в условиях, приближенных к «боевым»: с дымом и копотью, кипящим мозгом и плавящейся проводкой. Но, если, при всем, при этом, работа доставляет неимоверное удовольствие – комфорт это или нет? Вообще, скользкий термин, неопределенный. Вот, лично для меня, комфорт наступает тогда, когда я, собственной персоной, («О чудо!») на самом деле начинаю управлять своим замечательным изделием, а не наоборот. «Отсутствие напряжения психических и физиологических функций организма» – пожалуйста, будьте, как говорится, любезны – все по словарю, по определению.
А вообще интересно, как бы мы распорядились «максимально благоприятными для субъекта условиями внешней и внутренней среды». Попробуем представить, что на самом деле работаем в «тепличных условиях», идеальность которых нарушает только необходимость
перейти к академическому тону – все-таки серьезный дальше пойдет разговор, вы понимаете, о чем я.
Первые шаги в электропривод
Мы уже рассмотрели в предыдущих главах, как должна двигаться тележка в идеальных условиях и получили эталон, который позволяет нам, обосновано судить об эффективности применяемого алгоритма управления. Теперь наступила пора перейти к более сложной задаче – управлению тележкой с неидеальным приводом. Для этого, как обещал ранее, рассмотрим один из простых примеров – тележку с электроприводом постоянного тока.
На рисунке 1 представлен один из вариантов управляемой тележки. Особенности ее конструкция ясны из картинки, отмечу только, что тахогенератор, зубчатоременная передача, а так же оптический датчик перемещения еще сыграют свою роль, как то Чеховское ружье, висящее на стене в первом акте.
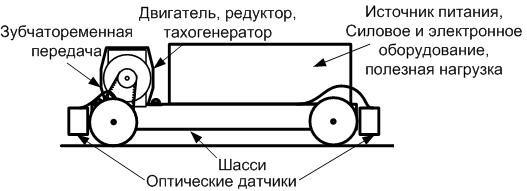
Рисунок 1. Тележка с электроприводом.
Где начинается кибернетика
• Играет поп с двумя гусарами в преферанс. Поп играет восьмерную и садится без лапы.
– Но как же так, – восклицает поп, – у меня же на руках было восемь козырей!
– Расклад батенька, расклад.
 И в правду, по студенческим воспоминаниям, пренеприятная ситуация. Впрочем, какого либо особенного цимеса в этой аллегории я не намечал. Просто решил немного развлечь себя и читателя накануне продолжительного разговора о том, как «все плохо». И, в правду, расстраиваться есть о чем. Иногда бывают такие расклады, о последствиях которых и не задумывался, пока редуктора испытуемого манипулятора не начинали издавать душераздирающий хруст с дальнейшим разлетом шестеренок и уничтожением имущества. Может я несколько и преувеличил, однако упомянутый рабочий момент стоит вашего пристального внимания.
И в правду, по студенческим воспоминаниям, пренеприятная ситуация. Впрочем, какого либо особенного цимеса в этой аллегории я не намечал. Просто решил немного развлечь себя и читателя накануне продолжительного разговора о том, как «все плохо». И, в правду, расстраиваться есть о чем. Иногда бывают такие расклады, о последствиях которых и не задумывался, пока редуктора испытуемого манипулятора не начинали издавать душераздирающий хруст с дальнейшим разлетом шестеренок и уничтожением имущества. Может я несколько и преувеличил, однако упомянутый рабочий момент стоит вашего пристального внимания.
Одно время я принимал посильное участие в настройке электропривода робота Пума. Привод каждого звена был тщательно налажен и отработан во всех мысленных и, как казалось мне, не мысленных режимах с учетом перегрузок и взаимного механического влияния. Однако, время от времени, в процессе одновременной работы нескольких звеньев пума начинала вести себя так, как будто бы вес звеньев робота резко и многократно увеличивался со всеми вытекающими «зубодробящими» последствиями. Забегая вперед, скажу, после некоторого раздумья мне удалось выяснить, что причина в источнике питания, который не «вытягивал» законных 20 ампер. Поэтому, при одновременном разгоне-торможении нескольких звеньев, силовые преобразователи приводов начинали демонстрировать электротехнические фокусы, описание которых заняло бы не одну страницу.
Кстати, об электроприводе постоянного тока. Вы наверное думаете, что он давно уже изучен и описан «вдоль, поперек и по-диагонали»? Так вот я с вами не согласен. Я вам со всей ответственностью заявляю – живой эксперимент всегда выявляет много тонкостей совершенно различной природы, как раз на стыке многих наук. Поэтому спецы – что механики, что электротехники, зачастую, приходят в полное недоумение от тех чудес, которые начинают демонстрировать их детища. Вот тут и приходит на помощь эта самая кибернетика.
Кибернетика начинается там, где светлые умы начинают искать общий язык. Лично я воспринимаю эту науку именно так. А то, что по ходу дела рождаются разумные машины, так это для меня само собой разумеющееся – о чем как не о них задуматься умному человеку?
А искать взаимопонимание, конечно, надо начинать с простых вещей. Поэтому оставим на некоторое время многозвенный манипулятор и вернемся к уже известному вам простому объекту управления – тележке с приводом.
Берем MATLAB за Simulink<< Оглавление >>Первые шаги в электропривод