Управление скоростью двигателя постоянного тока
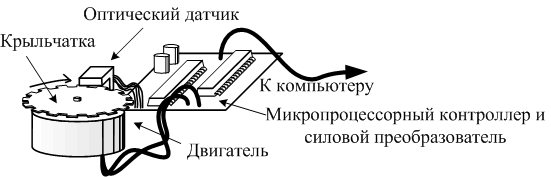
А на картинке мой первый стенд. Его подарил мне коллега перед отъездом в Корею много лет назад. Потом один студент взял для работы над дипломом и не вернул. Осталась одна картинка – “по-памяти”. Именно на этом простеньком стенде было проведено множество любопытных экспериментов, связанных с эффектами цифровых систем.
В предыдущих постах я представил вниманию общественности свой подход к настройке регуляторов “очень похожих на ПИ” на примере системы управления током мотора. Теперь в том же духе “мастер-класс” покажу как просто настроить контур скорости.
Элементарные цифровые регуляторы.
В первую очередь стоит упомянуть про пропорционально-интегральных (ПИ) регуляторы . Это очень простой простой способ управления и о нем написано очень много . Некоторые производители микроконтроллеров (например, FreeScale) в состав своих библиотек включают уже готовые, оптимизированные реализации ПИ – регуляторов. Сразу напишу почему не пишу про ПИД . Далее пойдет речь о системах, где дифференциальную составляющую невозможно толком измерить. Готовых решений навалом, ПИ-регулятор это очень просто и все его применяют.
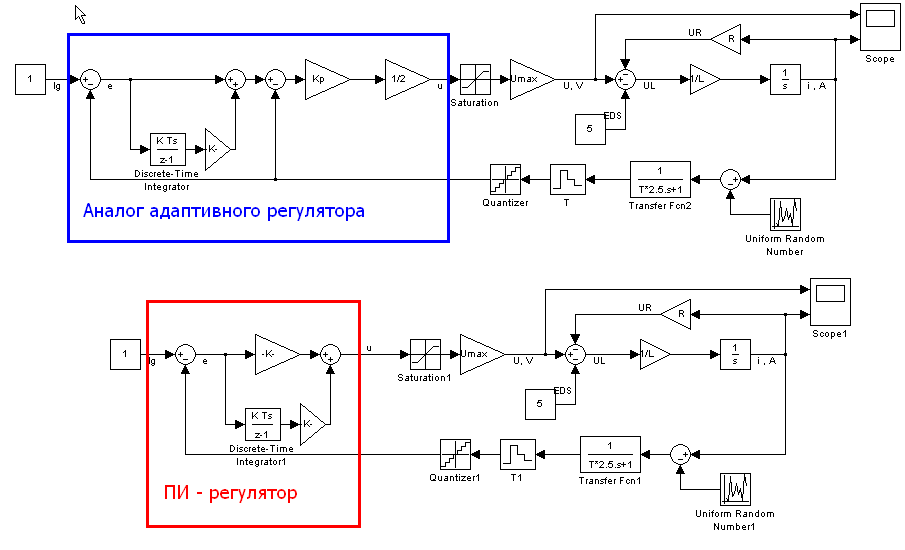
Я ПИ регулятор не применяю. Я использую “адаптивный регулятор с астатической эталонной моделью и сигнальной самонастройкой”. Под этим страшным названием скрывается довольно простая структура. Про нее мне рассказал мой наставник, а ему немцы , когда приезжали к нам с визитом дружбы в Политех. Это было 20 лет назад. И 20 лет все используют ПИ, а я использую “адаптивный” регулятор. Самое удивительное, что “адаптивный” регулятор при детальном рассмотрении практически не чем не отличается от ПИ, кроме как наличием дополнительной обратной связи. Я путем простых структурных преобразований привел исходную структуру адаптивного регулятора к такой, чтобы это сходство показать. Теперь ни как не понять почему регулятор называется адаптивным, зато можно с ПИ сопоставить.
На рисунке показаны две модели системы управления, демонстрирующих пример управления током в двигателе.
Метаморфозы адаптивного регулятора
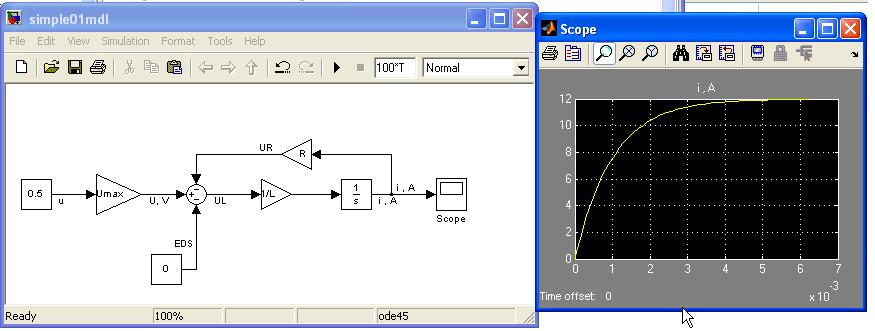
На рисунке представлен самый простой пример – управление током двигателя постоянного тока (ДПТ) пропорциональным регулятором. О модели объекта подробно здесь. У этой системы есть один существенный недостаток- статическая ошибка. Она возникает, например, когда двигатель раскручен и его противо-ЭДС надо как-то компенсировать подаваемым напряжением. А эта компенсация при пропорциональном регулировании возможна только если разность между заданным током Ig и текущим I током была НЕ нулевой. Вот эта необходимая разность и есть та самая неизбежная статическая ошибка. Та же проблема и с компенсацией падения напряжения сопротивлении обмоток двигателя. На рисунке показаны переходные процессы- хотели отработать 1А, а получилось меньше 0,8А.

Рисунок 1. Пропорциональный регулятор тока в ДПТ и переходные процессы при заданном токе 1А и заторможенном роторе.
Элементарная цифровая система управления на примере управления током двигателя постоянного тока . Часть 2. Метод быстрой настройка регулятора по “методу Юсупова”
Несколько слов об объекте управления. Очевидно, что он второго порядка (один порядок дает индуктивность, второй-фильтр). Пропорциональный коэффициент регулятора Kp я подобрал и он в пять раз меньше изначального варианта (когда не учитывался шум датчика)
Элементарная цифровая система управления на примере управления током двигателя постоянного тока . Часть 1. Объект управления и пропорциональный регулятор.
Простой пример – управление током в ДПТ. Казалось бы чего проще. Возьмем самую простую модель, где противо-ЭДС рассматривается, как внешнее возмущение. Подробности о модели ДПТ здесь.
Вместе с силовым преобразователем модель получилась очень простой и она на сигнал управления реагирует так:
{kind=link}
Параметры:
R=1; % Сопротивление, Ом
L=0.001; % Индуктивность, Гн
Umax = 24; % Напряжение источника питания, В
Imax = Umax/R; %Максимальный ток, А
T=1/16000; % Период дискретизации, с
di= Imax/(2^12 – 1); %Разрешение датчика А/попугай (12 бит)
Несколько слов о цифровых системах или чем цифровые системы управления отличаются от любых других
Формальное определение цифровых систем: система управления называется цифровой, если хотя бы один сигнал в ней дискретизируется по времени и квантуется по уровню.
Это практически все известные мне современные системы управления. Я же ограничу класс рассматриваемых мной систем управления следующими тезисами.
1) То чем управляю (объект управления)- это физическое устройство. Мне необходимо , что бы его некоторый показатель (физический сигнал – ток в электромоторе, например) принял желаемую для меня величину.
2) Интересующий меня показатель я могу либо измерить посредством датчика, либо опосредовано оценить по другим измеренным сигналам.
3) Данные измерений я могу преобразовать в цифровой вид, понятный для вычислительной машины (аналого-цифровое преобразование).
4) Вычислительная машина рассчитывает управляющий цифровой сигнал.
5) Управляющий цифровой сигнал преобразуется в систему физических сигналов, которые уже управляют силовым преобразователем (цифро-аналоговое преобразование).
6) Силовой преобразователь передает объекту энергию из источника или забирает ее.
Третий , четвертый и пятый пункт сейчас легко реализовать на микроконтроллерах , которые в одном корпусе имеют и вычислительная машину и множество аппаратуры- таймеры, счетчики, АЦП, ЦАП, интерфейсы передачи данных и многое другое.
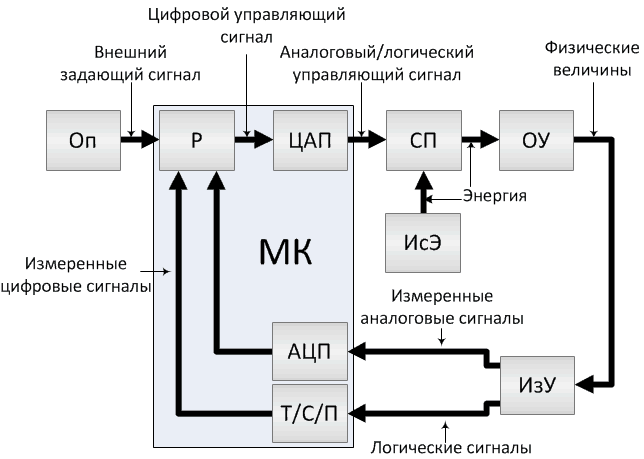
Рисунок 1. Цифровая ( можно еще сказать микропроцессорная ) система управления. На схеме обозначено: Прочитать остальную часть записи »
О выборе объекта управления.
О выборе объекта управления.
Трудно вот так, “без примера” и без опыта выбрать самому себе объект исследования. Я говорю: “все что угодно, лишь бы объект управления был второго или почти второго порядка”. Простейший пример, конечно, это тележка, модель которой называют «материальная точка». Если вдуматься, то в окружающем мире похожих объектов достаточно много. Просто оглянитесь вокруг. Я, не сходя со своего рабочего места, могу назвать сколько угодно примеров. Принтер, чайник, вентилятор, систему управления температурой, влажностью, вентиляция. И каждая система имеет множество подсистем – моторы, нагреватели, пневматика и гидравлика. И это все в моем помещении, оборудованном по среднестатистической офисной моде. Выйдите на улицу, там еще веселее. И много того, что можно повторить, а можно и пофантазировать. Пневматический привод моего кресла, управляемого с клавиатуры компьютера через WiFi, вот чего мне не хватает в жизни! На этот пункт домашнего задания я возлагаю очень большие надежды. Очень хочется подтолкнуть вас чуть ближе к практике. Абстрактных крючков и сферических коней и в книжках навалом.
Про модель объекта управления Прочитать остальную часть записи »
Правильная ПУМА
Самый первый удачный проект, в котором я участвовал- это модернизация робота PUMA 560. Разработан он еще при царе горохе, но ( NOKIA рулит) сделан так добротно, что выдерживает самые зверские испытания.
У всех она работает спокойно и умерено(как, собственно и положено рожденным в финке )
или так
а у нас вот так. Беспощадная кибернетика! При всем ее бешенстве она может вкопаться в заданном состоянии с точностью 0,01 градуса. Это, кстати 0,16 тысячных дистанций. Кто понимает- яростно завидуйте и делайте ку.
Кибернетические качели. Работа релейного регулятора в автоколебательном режиме.
Вот так это выглядит на практике