Несколько слов о цифровых системах или чем цифровые системы управления отличаются от любых других
Формальное определение цифровых систем: система управления называется цифровой, если хотя бы один сигнал в ней дискретизируется по времени и квантуется по уровню.
Это практически все известные мне современные системы управления. Я же ограничу класс рассматриваемых мной систем управления следующими тезисами.
1) То чем управляю (объект управления)- это физическое устройство. Мне необходимо , что бы его некоторый показатель (физический сигнал – ток в электромоторе, например) принял желаемую для меня величину.
2) Интересующий меня показатель я могу либо измерить посредством датчика, либо опосредовано оценить по другим измеренным сигналам.
3) Данные измерений я могу преобразовать в цифровой вид, понятный для вычислительной машины (аналого-цифровое преобразование).
4) Вычислительная машина рассчитывает управляющий цифровой сигнал.
5) Управляющий цифровой сигнал преобразуется в систему физических сигналов, которые уже управляют силовым преобразователем (цифро-аналоговое преобразование).
6) Силовой преобразователь передает объекту энергию из источника или забирает ее.
Третий , четвертый и пятый пункт сейчас легко реализовать на микроконтроллерах , которые в одном корпусе имеют и вычислительная машину и множество аппаратуры- таймеры, счетчики, АЦП, ЦАП, интерфейсы передачи данных и многое другое.
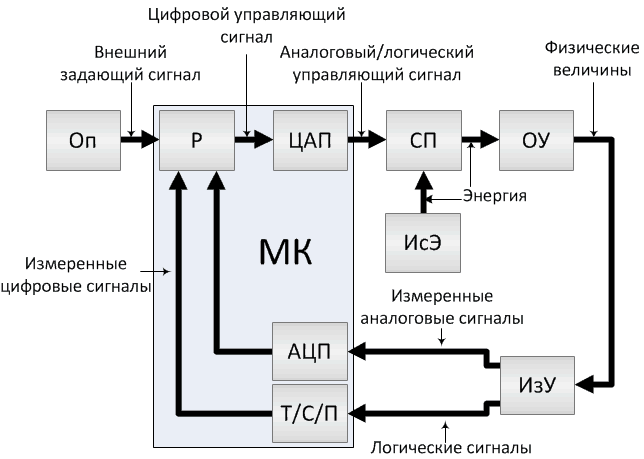
Рисунок 1. Цифровая ( можно еще сказать микропроцессорная ) система управления. На схеме обозначено:
Оп – оператор (человек или внешняя система управления). От оператора поступает “Внешний задающий сигнал” – информация о желаемом состоянии объекта управления.
Р – регулятор. Так как система управления микропроцессорная, то регулятор – это программа, которая в соответствии с задающим сигналом и измеренными сигналами рассчитывает управляющий сигнал.
ЦАП – цифро-аналоговый преобразователь,
СП – силовой преобразователь,
ИсЭ – источник энергии,
ОУ – объект управления,
ИзУ – измерительные устройства,
АЦП – аналого-цифровой преобразователь,
Т/C/П – таймеры/счетчики/прочая перефирия, позволяющая логический сигнал преобразовать в цифру.
Что такое аналоговый сигнал? Это напряжение или ток (есть и такие контроллеры) на выводах микроконтроллера. И этот сигнал может непрерывно изменяться от 0 до 3.3 или 5В (других пока не встречал).
Логический сигнал это практически тоже самое, что и аналоговый, но передающее устройство различает только 2 уровня 0 или 3.3 (5) В.
На физическом уровне цифровой сигнал – это комбинация логических сигналов, но для меня это просто некоторое число, которым оперирует вычислительная машина.
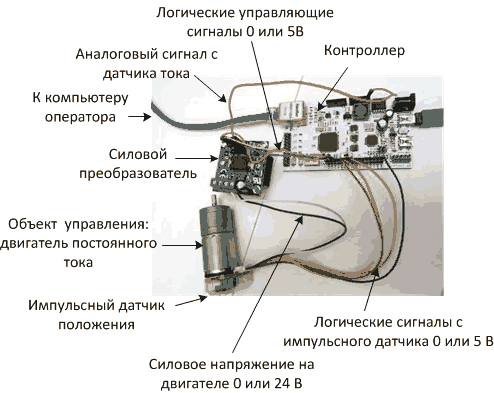
На рисунке 2 я представил пример типичной цифровой системы управления. Мозг этого изделия – контроллер. В данном случае – это микрокомпьютер SimpleCortex. К нему подключены аналоговый сигнал с датчика тока и логические сигналы с импульсного датчика угла поворота ротора. Контроллер путем трех логических сигналов управляет силовым преобразователем, который может подать на двигатель постоянного тока либо -24, 0, или +24В. Вот собственно и все устройство цифровой системы управления. Еще стоит упомянуть , что оператор связывается с контроллером по сети Ethernet. Одним словом- умное изделие.
Теперь несколько слов о ключевых особенностях цифровых систем. “Дискретизируется по времени” . Для того , что бы перевести физический сигнал в цифру нам всегда необходимо некоторое время, хотя бы для фиксации и сохранения в памяти компьютера измеряемых сигналов. Для проведения необходимых операций и расчетов компьютеру требуется некоторое время. Но это все теоретически преодолимые проблемы. Фундаментально же система управления привязана к дискретизации по времени , если ее силовой преобразователь работает по принципу широтно-импульсной модуляции: сигнал управления выдается строго через заданный промежуток времени – “период квантования” или “период дискретизации”. В известных мне системах управления период квантования определялся именно параметрами силового преобразователя.
Минусы дискретизации по времени очевидны: система управления всегда запаздывает со своей реакцией на поведение объекта управления. Однако есть и плюсы. В первую очередь это возможность согласованной работы силового преобразователя и измеряющих устройств. Измерения проводятся в тот момент, когда физические сигналы наименьшим образом подвержены быстро затухающими, но существенными по амплитуде процессами, всегда сопровождающими работу силового преобразователя и объекта управления. Эти процессы практически невозможно описать более-менее адекватной моделью. Поэтому системе управления лучше их и вовсе не видеть, чем реагировать на неучтенные, резвые, практически случайные паразитные сигналы.
Неизбежная пауза между изменениями управляющего сигнала может быть эффективно задействована для многих полезных действий – измерения и фильтрации сигналов, реализации сложных алгоритмов управления, общения с внешним миром и т.д. – микроконтроллер элегантно вписался в структуру системы управления.
Микроконтроллер наделяет систему управления безоговорочными преимуществами. Разработчик имеет возможность реализовать самые изощренные алгоритмы управления, дорабатывать и кардинально их изменять. Единожды разработанное управляющее устройство может использоваться для широкого круга задач. Маленькая микросхема, порой площадью меньше чем 5 кв. мм позволяет задействовать в разрабатываемом изделии самые современные и эффективные способы управления, коммуникации, человеко-машинный интерфейса.
Есть у микроконтроллера и еще одно, исключительно важное достоинство – это широкая доступность для начинающих. Поэтому я ни когда не позволю быть снисходительным со школьником, мигающим лампочками на своей arduino. Вот то, как лихо ребята вписываются в техническую кибернетику меня восторгает.
Итак цифровая система исключительно хороша в реализации, внедрении, эксплуатации. Но. На вашей разработке может поставить крест один единственный нюанс – квантование сигнала по уровню. При преобразовании физического сигнала в цифру его форма искажается совершенно неприятным образом. Возьмем , например задачу управления скоростью гиродина. Это устройство разработано для прецизионного управления ориентацией космического спутника. Угол поворота гиродина измеряет импульсный датчик. На один поворот двигателя с датчика приходит
4 194 304 импульсов. При всем при этом, относительно Луны спутник будет позиционироваться с ошибкой в 500 метров. Еще хуже с управлением скоростью вращения спутника. Допустим, бортовая система принимает решение один раз за 10 мс, а скорость должна управляться с точностью 5%. Минимальная скорость будет равна 20 импульсам за такт (погрешности+-1 импульс ) это примерно 0,0017 градусов за такт (0,17 градусов за секунду ) или 57 лунных километров за секунду.
Кстати, приведенный пример с гиродином показывает как измерительное устройство вносит и квантование по уровню и диктует период дискретизацию по времени – его нельзя снижать без ущерба точности измерения скорости. Таким образом, измерительное устройство само по себе переводит систему управления в класс цифровых – в этом случае применяем микроконтроллер с чистой совестью.
Следующая особенность цифровых систем не так очевидна, но может доставить множество проблем, особенно в экспериментальной работе, когда вдруг результат эксперимента совсем не соответствует теоретическим расчетам. Это проблема единиц измерения. Инженерное ремесло без них просто невообразимо. Но вот когда от физических величин мы переходим в цифровые, то вся информация об единицах измерения как-то стирается. В чем вы привыкли измерять момент силы? В Нм, полагаю. А не правильно. На самом деле в Нм/рад. И если в единицах Си радиан безразмерная величина, то в цифровом виде угол имеет вполне определенную размерность, “попугаев” на оборот, например.
В качестве ремарки скажу так. Я сторонник применения микроконтроллеров даже в тех системах управления, в которых ни силовой преобразователь, ни измерительные устройства не вносят квантование по времени или по уровню. Я готов внести в систему управления заведомый источник упомянутых проблем, а вот каким образом их преодолеть я обязательно еще расскажу.
Еще одна реплика- если из цифровой системы убрать квантование по уровню, то она станет импульсной. Тогда для расчетов можно применить очень мощный аппарат теории дискретных систем управления. Если убрать квантование по времени, то система превратиться в … вот тут я в замешательстве, но частный случай такой системы- релейная. В ней квантование по уровню вносит реле, имеющее 3 дискретных состояния (включен, выключен, противовключение).