О выборе объекта управления.
О выборе объекта управления.
Трудно вот так, “без примера” и без опыта выбрать самому себе объект исследования. Я говорю: “все что угодно, лишь бы объект управления был второго или почти второго порядка”. Простейший пример, конечно, это тележка, модель которой называют «материальная точка». Если вдуматься, то в окружающем мире похожих объектов достаточно много. Просто оглянитесь вокруг. Я, не сходя со своего рабочего места, могу назвать сколько угодно примеров. Принтер, чайник, вентилятор, систему управления температурой, влажностью, вентиляция. И каждая система имеет множество подсистем – моторы, нагреватели, пневматика и гидравлика. И это все в моем помещении, оборудованном по среднестатистической офисной моде. Выйдите на улицу, там еще веселее. И много того, что можно повторить, а можно и пофантазировать. Пневматический привод моего кресла, управляемого с клавиатуры компьютера через WiFi, вот чего мне не хватает в жизни! На этот пункт домашнего задания я возлагаю очень большие надежды. Очень хочется подтолкнуть вас чуть ближе к практике. Абстрактных крючков и сферических коней и в книжках навалом.
Про модель объекта управления
Мы (в теории) имеем возможность обобщить ключевые свойства объектов в математической модели. Модель нужна для того, чтобы однозначно понимать, чего мы можем добиться от объекта управления, а чего нет.
Другими словами модель (в нашем прикладном понимании) – это, в первую очередь, инструмент для разработки эталона. Потом, уже переходя к более сложной модели или к физическому эксперименту, мы будем опираться на своего рода “линейку”, которая покажет, подчиняется ли нам объект управления или наоборот, мы пляшем под его дудку (второе случается куда как чаще).
Я не буду затрагивать философию моделирования – дело хлопотное и результат проверяется, увы, только на физическом эксперименте. Причем, первым эффектом может оказаться тотальное уничтожение вашего изделия. Терпите.
Объекты бывают многомерные и просто объекты. Многомерные – это те объекты, чье состояние в покое нельзя описать единственной величиной. Вот, например, компьютерная мышка многомерна. Ее положение на столе ни как не опишешь одной координатой. Потребуется, как минимум, три: отступ слева, отступ справа, угол поворота. Стрелка же часов не многомерна – как только часы встали, ее положение относительно циферблата легко описать либо углом поворота, либо цифрой, на которой стрелка остановилась.
Дальше я буду говорить только об одномерных объектах. С многомерными все куда как сложнее.
Но что же такое “порядок объекта“. Под этим термином, как правило, подразумевают порядок дифференциальных уравнений, описывающих поведение объекта управления – его отклик на внешние воздействия. Однако тут есть одна проблема: чем подробнее описывается объект управления, тем сложнее его математическая модель, тем больше ее порядок. Чем то надо пренебречь. Может быть, вам поможет следующая интерпретация “порядка.
Итак, порядок объекта (правильнее говорить порядок модели объекта). Вообще это просто положительное число. Так и говорят: «объект 2-ого порядка», «объект 101 порядка» и так далее.
В практическом же плане его смысл я попробую объяснить на примерах.
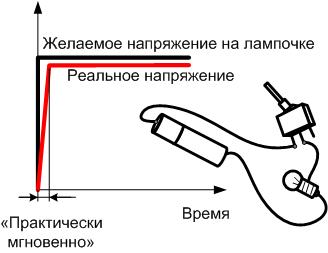
Объект нулевого порядка позволяет изменить контролируемый вами сигнал практически мгновенно. Или настолько быстро, что время изменения сигнала можно считать “несущественным”. Кнопку нажали, свет зажегся, а микросекундная задержка навряд ли вас сильно расстроит. ( Дале, я просто буду писать «Сигнал» – пусть это будет величина любого интересующего вас показателя, например, скорость вращения двигателя.).
Объект первого порядка не позволит мгновенно поменять сигнал. Но есть возможность практически мгновенно поменять скорость изменения сигнала (производную его функции по времени). Хотите набрать воды в чайник – открыли кран, вода сразу потекла – уровень воды в чайнике (он же вас интересует) начинает расти. Закрыли – тут же вода прекратила течь, уровень воды изменяться перестал. Но вам придется подождать, пока чайник наполниться до желаемого вами уровня.
Допустим, вы набираете чайник из пожарного крана с диким напором. Теперь ждать не надо. В этой ситуации вы можете уже говорить о чайнике, как об объекте нулевого порядка.

Объект второго порядка не позволит мгновенно поменять сигнал. Он так же не позволит поменять и скорость изменения сигнала. Но он позволяет… Тут мне не хватило словарного запаса, что бы оставаться на абстрактном уровне, поэтому сразу пример – привод корабельного бомбомета. Он не может мгновенно повернуться на заданный угол. Он не может мгновенно набрать угловую скорость. Но вот угловое ускорение (с точки зрения длительности всего процесса поворота) выходит на свой тактико-технический максимум практически мгновенно. После того как бомбы ушли, пусковая установка несоизмеримо облегчается и уже не только ускорение но и угловая скорость достигается “практически” мгновенно – мы вернулись к модели первого порядка.
Исследование объекта второго порядка для меня чистое удовольствие. Наглядно все. И множество объектов физического мира (с точки зрения теории управления, конечно же) могут быть описаны моделями 2-ого порядка.
Объект третьего порядка – трамвай. Он не может мгновенно переместиться на следующую остановку, не позволит мгновенно поменять скорость, не позволит мгновенно поменять ускорение (иначе пассажиры в окна вылетят).
На самом деле очень трудно сказать, какой порядок объекта “на самом деле”. Просто если объект проявляет себя именно так, как предполагает модель некоторого порядка, так этому и быть. Физика процесса не меняется, меняется наше отношение к ней. Так что если спросят “куда делся порядок” – ни куда он делся, просто объект перестал его проявлять. Нам же проще.
Порядок модели также сильно зависит и от того, каким сигналом мы управляем. Если, например, делаем систему управления положением трамвая, то это третий порядок, а если скоростью, то нам вроде как достаточно модели второго порядка, это если не учитывать упругие процессы в сцепке между вагонами. А если учитывать – то тогда это уже объект пятого порядка. В этом случае в нашем распоряжении есть такой подход как «подчиненное управление». Но это уже отдельная история.
Все эти размышления о порядке и изменении порядка объекта управления связано с тремя, пожалуй, фундаментальными ограничениями разрабатываемых нами систем. Мы не можем как угодно быстро отдавать объекту энергию или забирать ее. Мы не можем реализовать сколь угодно точные измерения. Конечно же, мы не можем как угодно часто проводить измерения. Я не буду утомлять вас далее подобными рассуждениями, отмечу только, что вынужденное упрощение модели побуждает нас затягивать переходный процесс в системе управления так, что бы все неучтенные процессы гарантировано затухали к его окончанию.
В качестве ремарки я напомню, что весь мой собственный опыт связан с цифровыми системами управления. И у них есть одно замечательное свойство – это очень четкое определение вербальных понятий, таких как “моментально” или “максимально точно”. “Моментально” – быстрее чем, за один такт работы цифровых измерительных устройств. “Максимально точно” – с точностью до одного кванта дискретизации по уровню. Понимать легче.
Про квантование по времени и «такты» можно прочитать здесь, а про кванты по уровню отдельная история. Кстати, релейная система управления «квантует» сигнал управления, который имеет только три состояния: -1, 0, 1. О релейной системе здесь .
Наконец, возвращаясь к выбору объекта управления. Пусть он будет «вроде как» 3-его порядка. То есть два значимых порядка (два интегратора, например) и еще одна постоянная времени. Возьмите большое время квантования (это сильно замедлит переходные процессы), что бы третий порядок уже не проявлял себя. И это не такое уж своеволие, как может показаться. В прикладной кибернетике довольно частое явление, да я вроде уже про это писал.