Элементарная цифровая система управления на примере управления током двигателя постоянного тока . Часть 1. Объект управления и пропорциональный регулятор.
Простой пример – управление током в ДПТ. Казалось бы чего проще. Возьмем самую простую модель, где противо-ЭДС рассматривается, как внешнее возмущение. Подробности о модели ДПТ здесь.
Вместе с силовым преобразователем модель получилась очень простой и она на сигнал управления реагирует так:
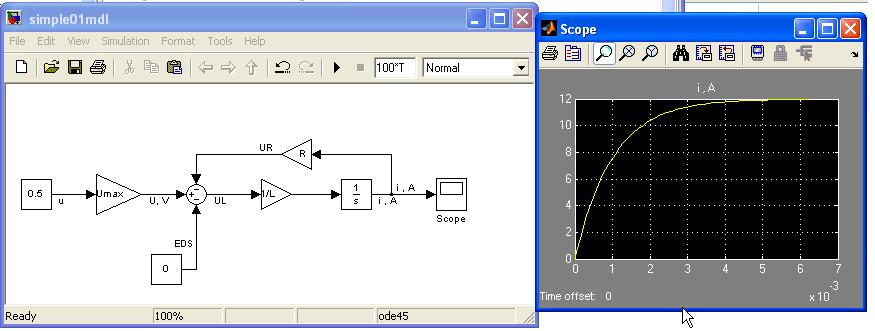
{kind=link}
Параметры:
R=1; % Сопротивление, Ом
L=0.001; % Индуктивность, Гн
Umax = 24; % Напряжение источника питания, В
Imax = Umax/R; %Максимальный ток, А
T=1/16000; % Период дискретизации, с
di= Imax/(2^12 – 1); %Разрешение датчика А/попугай (12 бит)
Теперь настроим для него (очевидно) пропорциональный регулятор. Речь, как вы понимаете, идет о цифровом регуляторе, поэтому не забудем про дискретизацию по времени T.
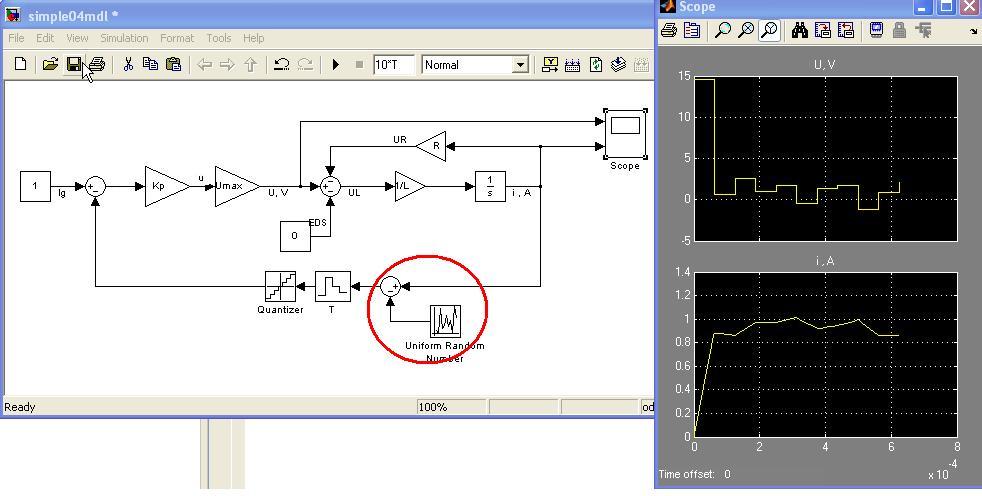
Вот модель вместе с регулятором.

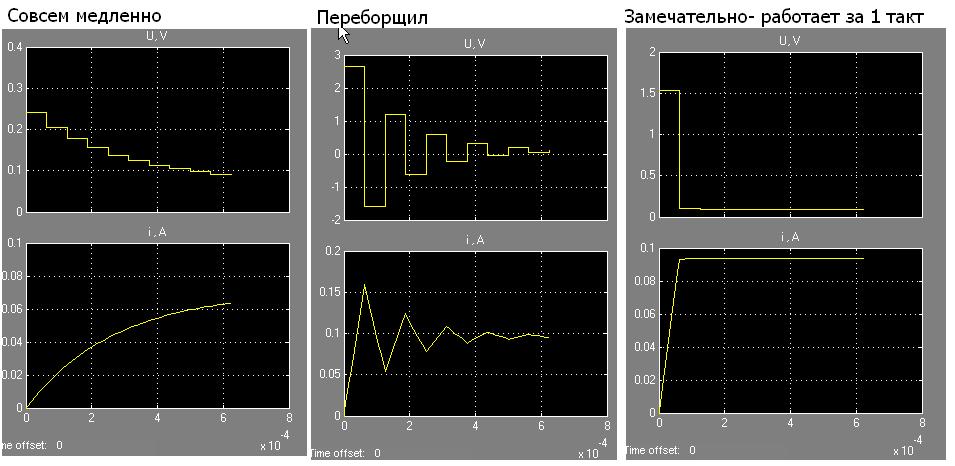
Заметили, что регулятор заданный ток 0.1 А отработан с ошибкой (получилось 0,094А) ? И это без учета противо-ЭДС. А вот с учетом (ЭДС = 1 В – мотор раскручен на 4% от скорости холостого хода):
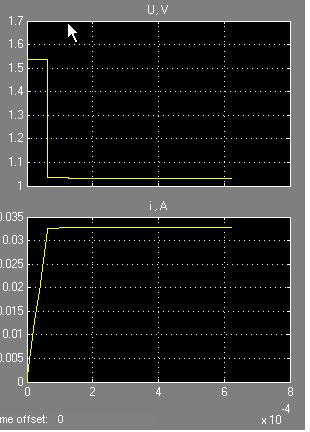
Вот уже совсем плохо. Внешняя система управления задала 0.1 А, а получили в 3 раза меньше. К этой проблеме вернемся чуть позже, пока это не самая большая беда.
Чего не хватает в схеме, так это квантование по уровню. Формально система управления была только дискретная. А вот после добавления нового блока- квантователя по уровню- цифровая. Вот, что получилось при задании тока 10 дискрет (60mA):
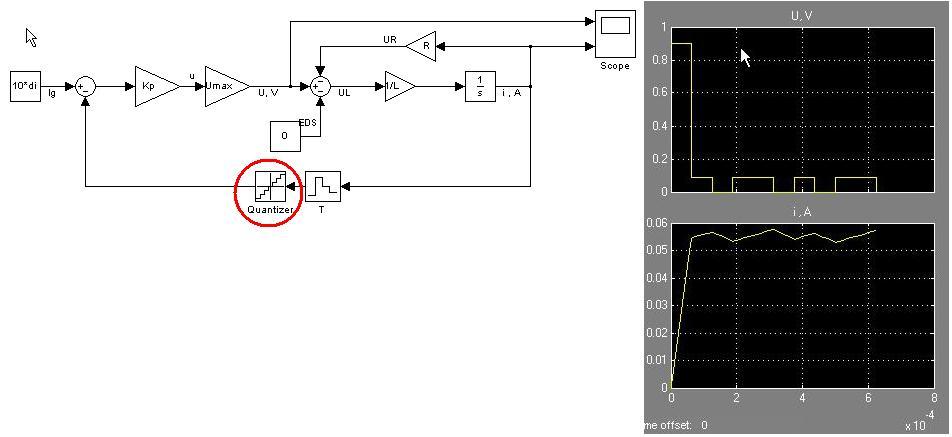
Ну и промоделируем нашу систему с учетом такого шума (попробуем отработать хоть 1А ):
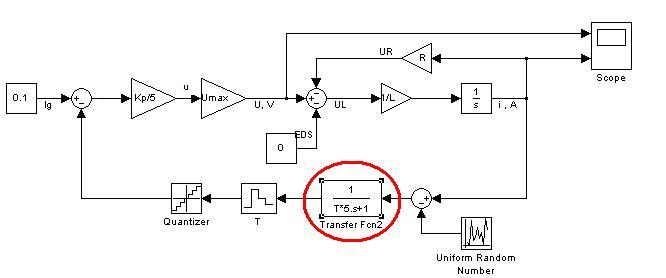
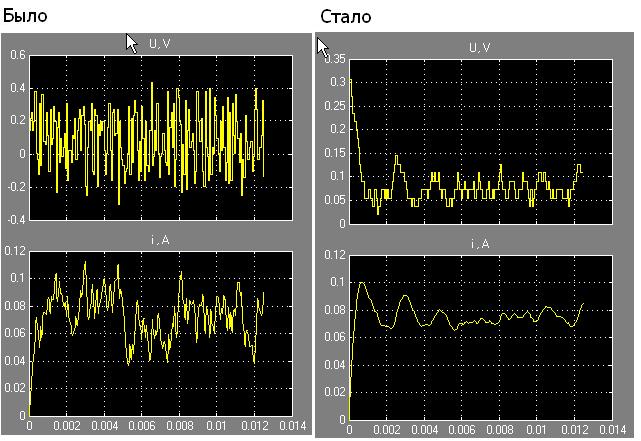
Таким образом, включение фильтра снизило пульсации сигнала управления и, соответственно, диапазон регулирования увеличивается в несколько раз (теряем, естественно, в быстродействии) .
Вот теперь мы будем работать с объектом управления, для которого и предназначен регулятор по “методу Юсупова”