Метаморфозы адаптивного регулятора
На рисунке представлен самый простой пример – управление током двигателя постоянного тока (ДПТ) пропорциональным регулятором. О модели объекта подробно здесь. У этой системы есть один существенный недостаток- статическая ошибка. Она возникает, например, когда двигатель раскручен и его противо-ЭДС надо как-то компенсировать подаваемым напряжением. А эта компенсация при пропорциональном регулировании возможна только если разность между заданным током Ig и текущим I током была НЕ нулевой. Вот эта необходимая разность и есть та самая неизбежная статическая ошибка. Та же проблема и с компенсацией падения напряжения сопротивлении обмоток двигателя. На рисунке показаны переходные процессы- хотели отработать 1А, а получилось меньше 0,8А.

Рисунок 1. Пропорциональный регулятор тока в ДПТ и переходные процессы при заданном токе 1А и заторможенном роторе.
Итак будем с этой проблемой бороться при помощи адаптивного регулятора. Его идея проста. В параллель объекту управления ставим астатическую эталонную модель (интегратор с коэффициентом), которая диктует как должен реальный объект управления реагировать на управляющий сигнал. Разность сигналов объекта и модели усиливается и к сигналу управления пропорционального регулятора прибавляется добавочка, которая подгоняет или притормаживает объект, если он двигается не так, как эталонная модель. Под нагрузкой объект начинает отставать от модели и эта разность как раз и компенсирует нагрузку.
Не буду вдаваться в подробности, просто покажу эту структуру. Обратите внимание, что коэффициенты усиления обозначены Kp – это тот же коэффициент, что и в пропорциональном регуляторе! А вот коэффициент при эталонной модели пришлось посчитать и немного скорректировать (увеличил на 30%). Формально этот регулятор входит в класс “адаптивный регулятор с сигнальной самонастройкой и эталонной моделью”
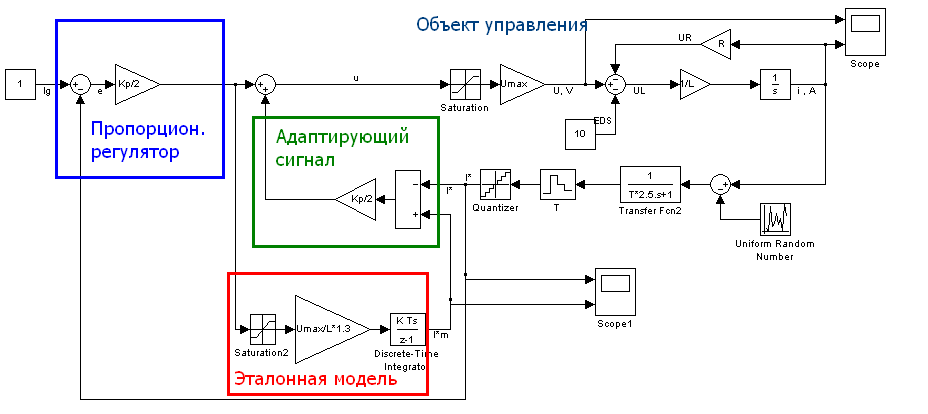
Рисунок 2. Адаптивный регулятор тока.
Вот теперь работаем без статической ошибки и даже под существенной нагрузкой
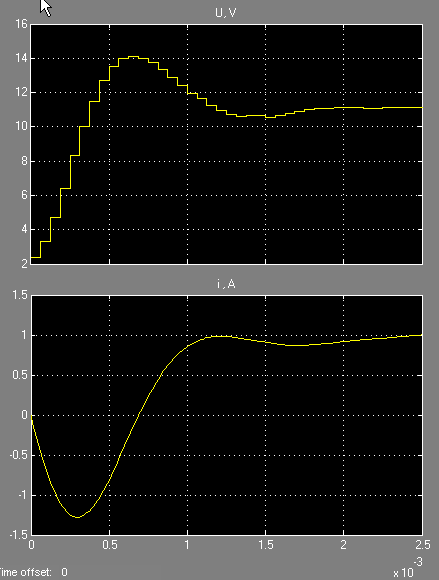
Рисунок 3.Адаптивный регулятор тока и переходные процессы при заданном токе 1А и противо-ЭДС 10В.
Адаптивный регулятор элементарным структурным преобразованием можно привести к следующему виду. Это же почти ПИ регулятор! Но есть одна обратная связь, которая в ПИ регуляторе отсутствует. Я, когда пришел к этому результату, был немало удивлен.
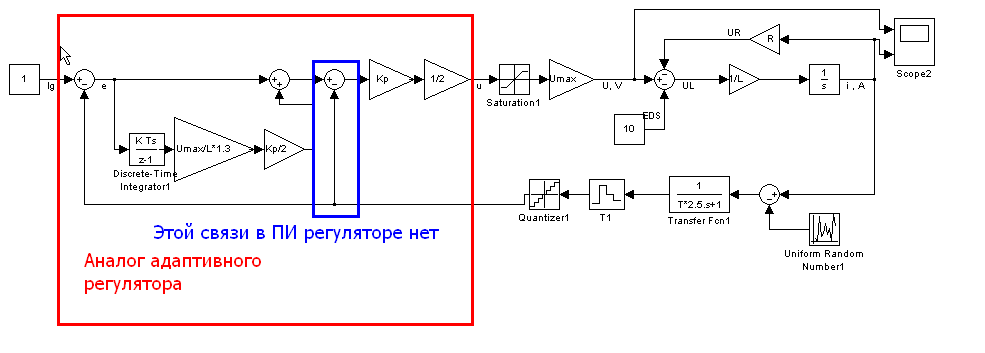
Рисунок 4. Адаптивный регулятор, преобразованный к виду, схожему со структурой ПИ регулятора.
Самое главное достоинство этой структуры – элементарная настройка в три приема.