Первые шаги в электропривод
Мы уже рассмотрели в предыдущих главах, как должна двигаться тележка в идеальных условиях и получили эталон, который позволяет нам, обосновано судить об эффективности применяемого алгоритма управления. Теперь наступила пора перейти к более сложной задаче – управлению тележкой с неидеальным приводом. Для этого, как обещал ранее, рассмотрим один из простых примеров – тележку с электроприводом постоянного тока.
На рисунке 1 представлен один из вариантов управляемой тележки. Особенности ее конструкция ясны из картинки, отмечу только, что тахогенератор, зубчатоременная передача, а так же оптический датчик перемещения еще сыграют свою роль, как то Чеховское ружье, висящее на стене в первом акте.
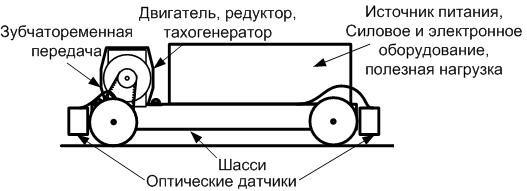
Рисунок 1. Тележка с электроприводом.
Кратко о деталях конструкции. Двигатель – преобразует электрическую энергию в механическую и наоборот. Редуктор – снижает обороты и увеличивает крутящий момент. При использовании двигателей постоянного тока, как правило, без редуктора не обойтись – момент у этих двигателей слабоват, мощность они выдают за счет оборотов. Тахогенератор замеряет обороты двигателя. Не редко, вместо тахогенератора, ставят датчики других конструкций, вот только некоторые из них, например импульсные, мне совсем не по душе. Объяснюсь по этому поводу чуть позже. В настоящий момент производители электродвигателей упаковывают двигатель, редуктор и датчик оборотов в один конструктив. Надо признать, что удовольствие это не из дешевых, но подобный подход очень эффективен и при компоновке изделия и при его эксплуатации. Для домашних экспериментов вполне подойдут вполне бюджетные варианты: мотор-редукторы от электрических отверток, приводы автомобильных стеклоподъемников, есть и другие варианты. А вот с измерением оборотов двигателя придется повозиться. Но если вы хотите сделать ваш привод быстрым и точным, то без датчика оборотов двигателя или измерения мгновенной скорости перемещения тележки вам не обойтись.
На ведущее колесо момент двигателя передается посредством ременной или зубчато-ременной передачи. Последняя более эффективна и позволяет передать довольно большие крутящие моменты. Например, некоторые модели профессиональных перфораторов используют как раз такую конструкцию передачи крутящего момента.
Пройденное расстояние отсчитывается посредством оптических датчиков по рискам, нанесенным по пути следования тележки. Вот дискретные датчики измерения пройденного пути или угла поворота применяются повсеместно. Например, в том же роботе Пума, импульсные датчики, установленные прямо на валу двигателя позволяют контролировать угол с точностью до 0,00011 радиан. А что же в нашем случае? Тут такой вариант не годится – проскальзывание ведущего колеса, особенно в форсированных режимах разгона и торможения сведет на нет ваши все старания.
Ну и, наконец, полезная нагрузка и источник питания, которые в следующем изложении будут играть очень важную роль.
Я в начале книги уже советовал вам приобрести или сконструировать для себя испытательный стенд. Рассматриваемая конструкция вполне подходит для разнообразных и занимательных экспериментов.
Теперь давайте разберем, какие особенности электропривода отличают нашу тележку от материальной точки. Для этого рассмотрим функциональную схему электропривода, которая представлена на рисунке 2. Стрелками на функциональной схеме помечены блоки, параметры которых могут изменяться во времени, внося существенные искажения в динамику электропривода.

Рисунок 2. Функциональная схема электропривода
Электропривод состоит из следующих функциональных блоков.
ИУ – измерительные устройства, которые измеряют силу тока, скорость движения тележки и ее координату. На данный момент не будем учитывать особенности измерительных устройств, это вообще отдельна тема разговора и мы к ней еще обязательно вернемся.
Р- регулятор, структура и назначение которого вам уже известны.
СП- тот самый силовой преобразователь, который начал чудить при испытаниях Пумы, в прочем по независящим от него причинам. Задача силового преобразователя – отработать заданную силу тока в двигателе. В упрощенном виде эта зависимость может быть представлена в линейном виде, когда сила тока пропорциональна сигналу управления. Коэффициент пропорциональности назовем “коэффициент усиления силового преобразователя” и обозначим . Пока силовой преобразователь справляется со своими задачами этот коэффициент остается неизменным. При перегрузке источника питания или разрядке аккумуляторов, величина этого коэффициента начинает варьироваться в ощутимо больших пределах.
В частности, предлагаю обратить внимание на переходные процессы по току в приводе Пумы. Они показаны на рисунке 3. Под рукой честно снятых данных, как всегда, вовремя не оказалось, так я нарисовал их от руки, по памяти. Я так намучался с эти эффектом, что еще долго буду помнить подобные сюрпризы. В момент торможения, когда заданный ток вполне может быть отработан только за счет накопленной двигателем энергии (двигатель в данном случае работает как генератор), ток все равно «просаживается» по амплитуде. Природа этого явления мне совершенно не ясна, приходится только мириться с эти фактом.
Кроме подобных неприятностей следует помнить еще и про то, что ток не может нарастать как угодно быстро. Это так же продемонстрировано на рисунке 3. Току мешает нарастать индуктивность якоря. При этом величина потокосцепления в двигателе, а, значит, и движущий момент двигателя практически пропорциональны этой индуктивности, так что сразу запоминаем, что избавиться от нее невозможно.
Я перечислил далеко не все особенности силовых преобразователей, которые способны попортить немало крови конструктору. Вы и сами в этом убедитесь, если начнете заниматься электроприводом. Если уж возьметесь за исследование электрических машин – первым делом обзаведитесь хорошим источником питания. Это вам мой настоятельный совет.
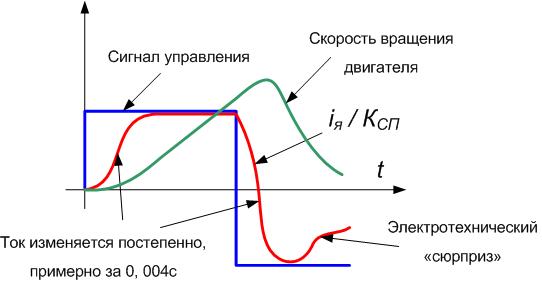
Рисунок 3. Переходные процессы в двигателе постоянного тока.
Пренебрегая динамическими особенностями силового преобразователя, определим математическую модель силового преобразователя следующим образом:
,
где - ток двигателя,
- сигнал управления.
Та как сигнал управления по прежнему будет находиться в пределах от -1 до 1, то - по величине равен максимальному току, который может отработать силовой преобразователь.
Структурная схема силового преобразователя будет иметь простой вид, как это показано на рисунке 4.
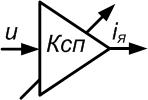
Рисунок 4. Структурная схема силового преобразователя.
Следующий элемент функциональной схемы электропривода, показанной на рисунке 1, является электрический двигатель постоянного тока с независимым возбуждением, который обозначен «ДПТ». На данный момент будем рассматривать его идеальную модель, когда движущий момент электродвигателя пропорционален действующей в нем силе тока. Коэффициент пропорциональности называют «магнитным коэффициентом». Эта величина относительно постоянна и определяется конструктивными особенностями двигателя. У магнитного коэффициента есть четкий физический смысл. Он описывает эффективную составляющую потокосцепления, которое участвует в создании движущего момента двигателя. Обозначать электромагнитный коэффициент будем через . Конечно, реальный электрический двигатель имеет еще много электромагнитных и электротехнических нюансов, но пока я не вижу необходимости вдаваться в подробности. Поэтому математическая модель ДПТ будет описываться следующими уравнениями.
Движущий момент, пропорционален току якоря двигателя:
.
Крутящий момент на валу двигателя – это сумма движущего момента двигателя и момента сил сопротивления.
Закону вращательного движения выглядит аналогично закону Ньютона и записывается следующим образом:
 ,
,
где - угловое ускорение – производная по времени угловой скорости
,
- момент инерции двигателя. Правильнее говорить приведенный момент инерции, который имеет следующий смысл.
Если движение будет происходить без проскальзывания ведущих колес, а передача движущего момента от двигателя к колесу будет абсолютно жесткой, то приведенный момент инерции это такая величина, опираясь на которую возможно выразить суммарную кинетическую энергию всех движущихся элементов тележки через угловую скорость вращения ротора двигателя:
,
Где - суммарная кинетическая энергия..
Структурная схема двигателя, учитывающая упомянутые упрощения представлена на рисунке 5.
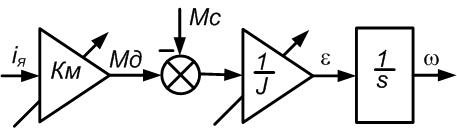
Рисунок 5. Структурная схема двигателя постоянного тока с независимым возбуждением.
Рассмотрим взаимосвязь приведенного момента инерции и массы тележки. При упомянутых условиях накопленная тележкой энергия складывается из суммарной кинетической энергии вращения ротора двигателя , кинетическая энергии вращения колеса
и кинетической энергии поступательного движении всех элементов тележки
.
Суммарная кинетическая энергия: .
Кинетическая энергия ротора:
,
где - угловая скорость вращения ротора двигателя,
- суммарный момент инерции ротора двигателя, деталей редуктора и ведущего шкива зубчатоременной передачи.
Кинетическая энергия колеса:
, где
- угловая скорость вращения колеса,
-
суммарный момент инерции ведущих колес и ведомого шкива зубчатоременной передачи.
Вращение колеса связано со скоростью вращения ротора по соотношению
,
где - суммарное передаточное отношение редуктора и зубчатоременной передачи.
Тогда кинетическая энергия вращения колеса запишется следующим образом:
Кинетическая энергия поступательного движения тележки может быть представлена следующим образом:
,
где -масса всех элементов тележки, кроме полезной нагрузки. Эта масса остается неизменной при эксплуатации тележки;
- это масса полезной нагрузки. Она может варьироваться от нуля, до некоторой максимальной величины, определяемой номинальной нагрузкой двигателя и соотношением возможных внешних сил, зависящих от массы. Например, это может быть сила тяготения при движении пол уклон или сила сухого трения.
Скорость движения тележки связана со скоростью вращения колеса по соотношению
,
где - поступательная скорость тележки,
- радиус колеса. Поэтому
Суммарная кинетическая энергия из следующих составляющих:
Подставим известные нам выражения энергий:
 .
.
Таким образом, приведенный момент инерции связан с полезной нагрузкой тележки следующим образом:
.
Тут, как вы понимаете, пределы изменения приведенного момента инерции сильно зависят от передаточного числа редуктора. Тем не менее, эта величина не может считаться постоянной.
Взаимосвязь скорости движения тележки и скорости вращения ротора двигателя, без проскальзывания ведущих колес подчиняется следующему закону:
.
Здесь впервые встречается один параметр: . Совсем недавно о его существовании я даже и не подозревал. Более 10 лет занятия механикой оставили без внимания один совершенно очевидный факт: в известных мне уравнениях не совпадают единицы измерения! На самом деле, посмотрите на формулы и проанализируйте следующие несоответствия. Угловое ускорение, как известно, измеряется в радианах на секунду в
квадрате: . Запомним этот факт. Теперь обратим внимание на
уравнения, аналогичные уравнению Ньютона для поступательного движения. Рассмотрите внимательно на единицы измерения. Угловое ускорение вдруг измеряется в непонятных мне единицах на секунду в квадрате.
Куда делись радианы? Этот вопрос не давал мне покоя, пока мне не стало совершенно понятен один важный момент: в школе меня надули. Мне там не рассказали про существование одного важного коэффициента. Так как его придумал я сам, то и название я ему даю такое: угловой коэффициент. Вместе мои студенты предложили обозначать его греческим символом . Угловой коэффициент играет одну роль – несет в себе единицу измерения:
.
Таким образом, переход от вращательного движения к поступательному, в случае простого колеса, описывается следующей формулой:
,
где -перемещение,
– угол поворота колеса,
- радиус колеса,
- угловой коэффициент.
Если теперь записать уравнения энергии и работы, то мы вынуждены будем признать, что момент силы измеряется в следующих единицах:
,
а момент инерции:
.
Вот теперь, во всех уравнениях полный порядок с соответствием единиц измерений. А самый важный результат состоит в том, что при вынужденном переходе к другим единицам измерения, например в дискретных расчетах, на борту вычислительной технике, где буквально все величины имеют только оду единицу измерения – «отсчеты» или «дискреты».
Вот теперь, взаимосвязь скорости вращения ротора двигателя и перемещением описывается структурной схемой, представленной на рисунке 6.
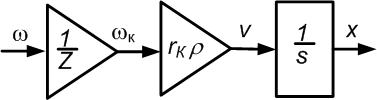
Рисунок 6. Взаимосвязь скорости вращения ротора двигателя и перемещения.
Рассмотрим собственное движение тележки, вызванное только движущим моментом двигателя и силами инерции. Объединяя структуры, представленные на рисунке 4,5,6 мы, без учета проскальзывания и моментов сопротивления получаем структуру, представленную на рисунке 7. Так как передаточное число редуктора и радиус колеса у нас в процессе движения неизменны, то эти коэффициенты можно совершенно законно перенести влево, за первый интегратор. Тогда перемножив все коэффициенты и полагая их неизменность, получим идеальную модель тележки, структурная схема которой представлена на рисунке 8.

Рисунок 7. Структурная схема тележки с электроприводом, без учета проскальзывания и моментов сопротивления .
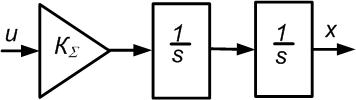
Рисунок 8. Идеальная модель тележки без электропривода.
Как видите, мы получили полный аналог материальной точки, только в уравнении участвуют моменты инерции и движущие моменты, приведены к поступательному движению. По этому, движение тележки будет подчиняться следующему дифференциальному уравнению:
,
где
.
Очевидно, что полученный коэффициент аналогичен отношению
, в случае материальной точки и имеет четкий физический смысл, а именно максимально возможное ускорение поступательного движения тележки. Можете убедиться в этом, подставив соответствующие единицы измерения.
А раз так, то и релейный алгоритм управления, и подход к оценке качества переходных процессов остаются прежними. Другое дело, как поведет себя система управления, если в дело вступят неучтенные нюансы – силы сопротивления, проскальзывание. Особенно интересные исследования связаны с работой системы, когда в силу различных причин изменяется соотношение коэффициента усиления силового преобразователя и момента инерции. Об этом в следующих разделах.
Где начинается кибернетика<< Оглавление >>Электропривод повышенной комфортности
[...] Первые шаги в электропривод<< Оглавление >>Кибернетические качели AKPC_IDS += "1609,";Popularity: unranked [?] Рубрика: Новости [...]
[…] Первые шаги в электропривод Кибернетические качели. Работа релейного регулятора […]