В поисках идеала. Эталон движения материальной точки.
 Вы уже, наверное, заметили, как время от времени я практически неосознанно переключаюсь между терминами «объект управления» – «материальная точка» – «тележка». Что бы внести ясность в этой терминологической чехарде, я сначала было дернулся переписать все главы, однако проследил логику в своем изложении, и она оказалась весьма внятной.
Вы уже, наверное, заметили, как время от времени я практически неосознанно переключаюсь между терминами «объект управления» – «материальная точка» – «тележка». Что бы внести ясность в этой терминологической чехарде, я сначала было дернулся переписать все главы, однако проследил логику в своем изложении, и она оказалась весьма внятной.
Если я хочу подчеркнуть роль в структуре системы управления того объекта, которым хочу порулить, я его так и называю: «объект управления». В этом случае меня мало интересует его физическая сущность, скорее всего, меня интересует то, что я хочу получить от объекта управления, а самое главное каким способом я буду определять получил ли я от него чего хотел, или объект двигался как ему вздумалось.
Когда я употребляю термин «материальная точка», то я фиксирую ваше внимание на физической сути процесса, который я считаю наиболее простым в описании и, самое главное, наиболее ПОЛЕЗНЫМ в представлении моего понимания теории управления.
И наконец, если я хочу вызвать у вас, мои глубокоуважаемые коллеги, те ассоциации, которые позволят вам ознакомится с моей теорией на уровне рефлексных ощущений окружающего мира, то тут я начинаю говорить про тележку. Я выбрал ее потому, что в первом приближении или в некоторых технологических процессах она достаточно адекватно может рассматриваться, как материальная точка, и к ней применимы такие самоочевидные термины, как заданное положение, тормозной путь, тяга и прочее. Каждый раз, когда у меня появлялось или будет появляться сомнение в очевидности моих рассуждений, я буду апеллировать к этой самой тележке. Мне кажется, что так будет понятнее, в машинки в детстве все играли и на велосипедах все катались.
Поэтому, вернемся к примеру управления тележкой. Напомню, что лейбмотивом всего моего изложения является поиск такого алгоритма, который позволяет тележке переместиться максимально быстро в заданное положение. Надеюсь, что в настоящий момент для вас стало самоочевидным фактом, что тележка должна двигаться в два приема: разгон с максимальным усилием и торможение, тоже с максимальным усилием.
Так же для вас уже должно быть очевидным, что существует такое соотношение оставшегося пути и текущей скорости, которое абсолютно четко указывает, должны ли мы продолжать разгон или уже пора приступить к торможению.
Теперь я покажу способ, который позволит формализовать и очень просто реализовать этот алгоритм. Короче приступаем к основному блюду, «культур-повидло» (с) оставим на десерт.
Для начала, рассмотрим функцию, которая определяет, как далеко тележка далека от состояния, когда пора тормозить. Эта мера следует из закона торможения:
=e+\frac{1}{2}\frac{m}{F_{max}}\dot{e}|\dot{e}|")
На самом деле, если, при перемещении тележки с некоторой ненулевой скоростью, как показано на рисунке 12,
функция ")
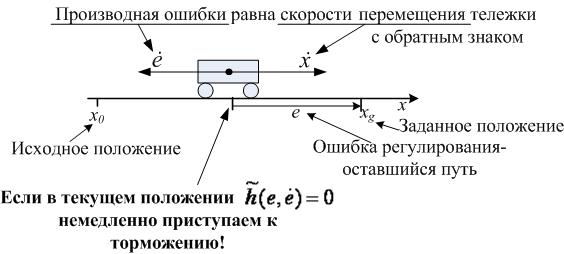
Рисунок 12. Тележка находиться в состоянии, когда необходимо переключиться с разгона на торможение.
Если функция
=0\rightarrow \tilde{h}(e,\dot{e})=e+\frac{1}{2}\frac{m}{F_{max}}0|0|=0\rightarrow e=0")
Положительное значение функция
Первая ситуация представлена на рисунке 13, где показан случай, когда тележке перемещается в положительном направлении, и ее можно продолжать разгонять, так как оставшийся путь еще достаточно велик. В этом случае тяга привода должна иметь положительный знак.
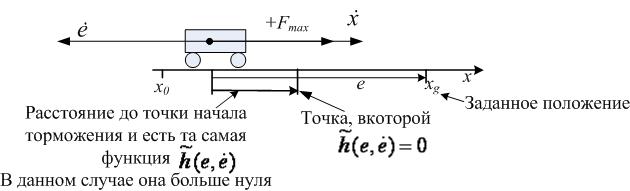
Рисунок 13. До того состояния, когда уже будет «пора тормозить», нам еще ехать и ехать, поэтому смело разгоняем тележку в положительном направлении
Второй вариант продемонстрирован на рисунке 14, когда перемещение тележки осуществляется в отрицательную сторону, а так как ехать осталось совсем немного, то тележку затормаживает положительная тяга привода.
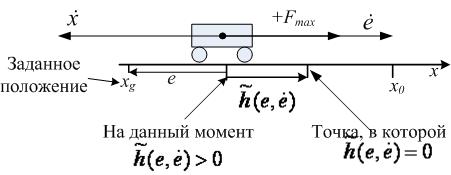
Рисунок 14. Тележке было предписано двигаться в обратном направлении, поэтому, торможение происходит при положительной тяге.
Эти два случая движения тележки показывают, что, если
Отрицательное значение
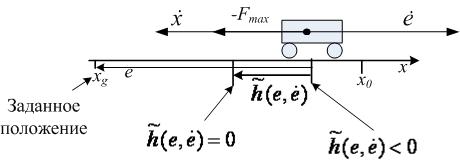
Рисунок 15. Разгон тележки в отрицательном направлении.
Наконец, рисунок 16 демонстрирует еще одну ситуацию, когда перемещение тележки осуществляется в положительную сторону, и она находиться в режиме торможения. В этом случае, тяга привода имеет отрицательный знак, а ее амплитуда должна принимать свою максимальную величину.
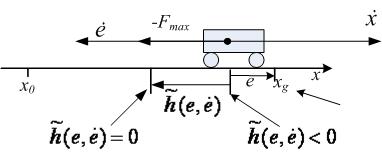
Рисунок 16. Тележка движется в положительном направлении. Двигаться осталось совсем немного, поэтому происходит торможение тележки под воздействием максимальной отрицательной силы.
Последние два варианта движения тележки показывают, что, если
Обратим внимание, что если речь идет о торможении тележки, то тяга привода направлена в ту же сторону, что и производная ошибки. Кроме этого, знак (направление) тяги привода всегда совпадает со знаком функции
Обобщим вышесказанное и запишем закон управления в следующем виде:
>0 \\ u=-1, &h(e,\dot{e})<0 \\ u=0, & h(e,\dot{e})=0 \end{cases}")
где
 =\begin{cases}\tilde{h}(e,\dot{e}), & \tilde{h}(e,\dot{e})\neq 0 \\ sign(\dot{e}), &\tilde{h}(e,\dot{e}) =0\end{cases}")
Функция
На заре кибернетики, когда ассортимент элементной базы был еще довольно скудным, подобный алгоритм управления было принято реализовывать при помощи электромагнитного преобразователя, который называли «реле». Поэтому, подобные простые алгоритмы управления с тех времен принято называть «релейными». 
Функция переключения имеет еще очень важную трактовку. Не трудно доказать (и на самом деле могу доказать, вам это надо?), что если торможение началось в момент, когда функция переключения обратилась в ноль, то все последующие состояния материальной точки, вплоть до ее полной остановки, будут так же лежать на фазовой
траектории, подчиняющейся закону торможения: =0")
Забегая вперед, скажу, что любой физический объект, динамика которого подчиняется дифференциальным уравнениям второго порядка, независимо от его природы, имеет свою собственную оптимальную фазовую траекторию. Поэтому, для всех объектов второго порядка, релейный алгоритм, опирающийся на оптимальную фазовую траекторию, всегда будет давать НАИЛУЧШИЕ результаты, которые мы будем рассматривать как ЭТАЛОН движения объекта управления. Повторяюсь, конечно, но этот момент исключительно важен.
Имея под рукой упомянутый эталон, вы всегда будете иметь полное и ясное представление, на сколько хорошо ваш алгоритм управления справляется с поставленной задачей. Особенно это критично, когда по той или иной причине приходиться жертвовать быстродействием системы (уверяю вас, такие причины найдутся всегда, каким бы идеальным не был ваш аппарат). В этом случае вы заранее знаете, чем и ради чего вы пожертвовали. Вы владеете и управляете системой, как тот шахматист, который жертвует слоном, чтоб потом взять ферзя. Полагаю, что звучит несколько высокопарно, однако простите меня, пожалуйста. Меня иногда захлестывают эмоции от переживаний тех моментов, когда партия на самом деле была за нами. Я еще расскажу вам об этом.
Однако я отвлекся от дела, впрочем, осталось совсем немного. Релейный регулятор может быть представлен в виде структурной схемы, как это показано на рисунке 17. В структуру регулятора входит элемент «реле», который и производит переключение сигнала управления .
Рисунок 17. Функциональная схема релейного регулятора.
В рассматриваемом нами примере управления тележкой алгоритм релейного управления можно сформулировать следующим образом: разгоняемся до тех пор, пока не выходим на оптимальную фазовую траекторию, а потом включаем торможение и обязательно попадаем в заданное положение.
Предполагаю, что не всем и не все понятно, тогда предлагаю перенести всю нашу теорию на рисунок 18, как говорится лучше один раз увидеть. Построим фазовый портрет движения тележки.
Для начала в координатах ошибки и ее производной построим оптимальную фазовую траекторию, которая гарантирует остановку тележки в заданном положении за одно включение торможения. Обозначим эту кривую CD.
Для определенности будем считать, что движение тележки должно произойти в положительном направлении и в начальный момент времени тележка находиться в состоянии покоя. Начальное состояние тележки обозначим на фазовом портрете точкой A с координатами
")
В первый момент времени система управления начинает разгонять тележку c максимальным усилием и делает это до тех пор, пока не выведет ее на траекторию торможения CD в точке B.
После того, как объект управления вышел на фазовую траекторию CD, регулятор включает обратную тягу. Через некоторое время, тележка, двигаясь по оптимальной фазовой траектории CD , попадает в точку, в которой ошибка и ее производная равна нулю. Собственно и все- тележка находится в заданном положении.
Рисунок 18. Фазовый портрет движения материальной точки при релейном управлении
Рассмотрим некоторые моменты движения материальной точки при релейном управлении.
Динамика разгона материальной точки подчиняется следующему закону:
=-\frac{F_{max}}{m}t")
=x_g-\frac{F_{max}}{m}\frac{t^{2}}{2}")
Фазовая траектория разгона:

Точка B, в которой пересекаются траектории разгона и оптимальная фазовая траектория, описывается фазовыми координатами")

Проведем следующие алгебраические преобразования:

Подставив первое уравнение во второе, получим:

Отсюда следует, что торможение начнется, когда тележка пройдет половину пути:

Время торможения:
Обратим внимание, что время разгона равно времени торможения
Таким образом, получаем алгебраическое подтверждение вообще очевидного факта, свидетельствующего о том, что первую половину пути надо разгоняться с максимальным усилием, а вторую половину пути тормозить также с максимальной силой. Естественно, что все это справедливо, если сила разгона и торможения одинаковы. Зато мы теперь знаем, как быстро материальная точка может преодолеть заданное расстояние. Вот вам и эталон.
Это характерно для систем управления, в которых разгон и торможение происходят за счет тяги привода. В частности, большинство известных мне систем с электроприводом как раз и обладают этим самым свойством, так как момент в электроприводе зависит от величины электрического тока, а ток, как правило, жестко ограничен нагрузочными способностями силового преобразователя.
А вообще, хватит теории, пора и поэкспериментировать. Для этого нам потребуется MATLAB с его незаменимым инструментом Symulink. Желающие могут использовать и другие инструменты, а заодно и меня с ними познакомить.
Я, кстати, помню замечательную программку доктора Мюллера из Дрезденского университета. Это было шустрое и простое средство моделирования, но не помню, как называлось. А жаль.
Рисуем фазовый портрет<< Оглавление >>Берем MATLAB за Simulink
Интересная статья. Буду ждать лабу, записываюсь в бета тестеры :)
[…] В поисках идеала. Эталон движения материальной точки. Пума […]
[…] В поисках идеала<< Оглавление >>Где начинается кибернетика […]