“Раз ступенька, два ступенька”. Дискретизация сигналов по времени
Посветить вам на ступеньки?- Нет, спасибо, я уже лежу внизу.
Дискретные системы – это целая наука. Причем наука суровая и беспощадная. Чего стоит одно дискретное преобразование. Каждый раз, когда я, собственной персоной, начинаю изучать этот предмет (признаюсь, каждый раз приходится начинать сначала), прихожу в совершенно искренний ужас. Один переход из аналогового сигнала в дискретный вид чего стоит. При этом совершенно реальный сигнал, который можно измерить, увидеть на осциллографе, в конце концов, нарисовать на бумаге, превращается в трудно осознаваемую последовательность делта-импульсов.
Дельта-мпульс – это такой сигнал, площадь которого не ноль, но длительность нулевая и амплитуда бесконечна. Предположите, что такие импульсы идут один за другим, с определенной периодичностью. Время между импульсами называют «период квантования». Так наливаем кофе, переводим дыхание и готовимся к продолжению. Пока пьете кофе – посмотрите на картинки, которые, возможно, что-либо прояснят.
На рисунке 1 представлен квантователь- именно он вполне осязаемый сигнал переводит в последовательность дельта-импульсов, имеющую следующие формальное представление
, где
-период квантования,
– номер импульса (номер «такта») ,
– дельта-функция (функция Дирака) для которой при любом
одновременно выполняются следующие равенства:
.

Рисунок 1. Преобразование аналогового сигнала в импульсный.
«Для чего такие сложности?» – спросите вы. «Зачем эта серия импульсов, почему просто не заменить исходный сигнал последовательностью значений сигнала, выбранных на каждом шаге квантования?».
Упомянутая последовательность, которую называют «решетчатая функция», пример которой приведен на рисунке 2, на самом деле получается элементарно. Однако тут есть любопытный нюанс. Решетчатая функция определена только в момент квантования, во все другие моменты времени эта функция формально не существует. А нам с ней еще работать и даже, прошу прощения, интегралы с ее участием рассчитывать. Так вот для заполнения этого формального пробела, как раз и применяется этот математический трюк – последовательность делта-импульсов. Функция, описывающая эту последовательность, определена на всей шкале времени. А для того, что бы перевести импульсный сигнал в эквивалентный, практически реализуемый вид применяют математический объект «экстраполятор нулевого порядка». В связке с квантователем, экстраполятор переводит сигнал в интуитивно понятные «ступеньки», как это показано на рисунках 3 и 4. В MATLAB эту связку реализует блок, показанный на рисунке 5. В принципе мне, да и вам изложенной информации будет достаточно, чтобы изучить особенности дискретных регуляторов для непрерывных объектов управления.
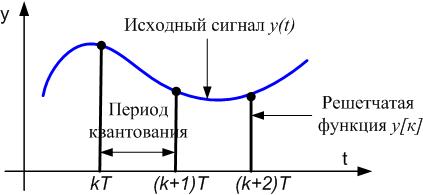
Рисунок 2. Решетчатая функция.
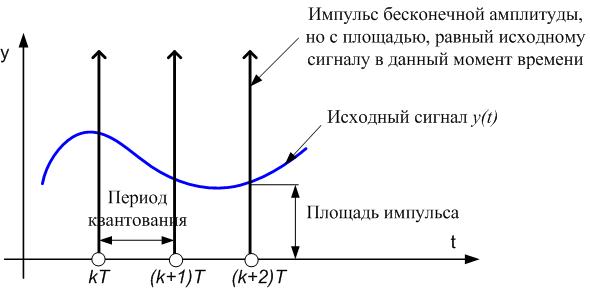
Рисунок 2. Последовательность делта-импульсов.
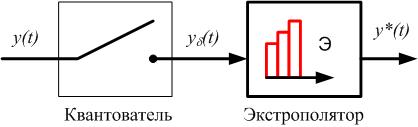
Рисунок 3.Преобразование исходного сигнала в «ступенчатый».
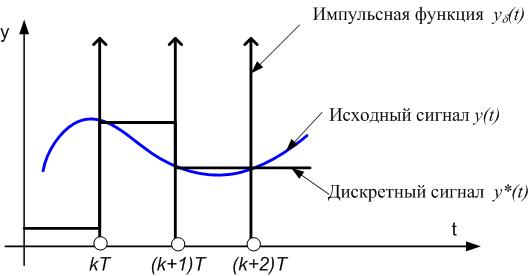
Рисунок 4. Переход от последовательности импульсов к ступенчатому «сигналу».
Рисунок 5. Экстраполятор в MATLAB.
Когда мне раньше задавали вопрос – «А зачем нужна дискретизация по времени?”, я, честно говоря, всегда ссылался на некоторые, по сути, посторонние для теории управления вещи, такие как надежность дискретных систем, легкость реализации, и прочее. Я воспринимал дискретизацию по времени как плату за преимущества цифровых систем, вообще, если позволите так выразиться, рассматривал ее, как неизбежное зло. Однако давайте рассмотрим некоторые факты.
Помните скользящий режим при релейном регулировании? Напомню, он характерен тем, что объект управления движется в фазовом пространстве по заданной фазовой траектории. Поэтому релейная система управления для любой внешней системы управления является наблюдаемой, управляемой и прогнозируемой, другими словами, внешние системы управления будут работать в полном комфорте. Платим же мы за это чудовищным по форме сигналом управления. Релейная система, сама по себе, легко реализуема, но в реальной жизни мало эффективна. Об этом я уже рассказывал.
То, что не существует аналоговой линейной системы управления, которая бы заставила пройти объект управления строго по заданной фазовой траектории, я вам доказывать не буду, так как придется вдаваться в теорию линейных систем, а это сейчас совсем не к чему. Поэтому просто поверьте на слово, а потом, при случае, проверьте.
Так вот, первое неоспоримое преимущество дискретной системы управления непрерывным объектом состоит в том, что дискретная система, точно так же как и релейная, может заставить объект управления в дискретные моменты времени оказываться на заданной фазовой траектории. В этом ракурсе дискретный регулятор- это компромисс между релейным и линейным регулированием. О втором, не менее важном преимуществе дискретных систем, поговорим в другой раз, когда будем рассматривать подчиненное управление.
А что такое шаг дискретизации и как его узнать в определенных системах?
Шаг (период) дискретизации – это период времени между тактами (шагами). Система управления принимает решения не постоянно, а только в равные промежутки времени. В начале такта система управления измеряет состояние системы (например для тележки- это будут данные о положении, скорости, параметры силового преобразователя). Потом на основе внешнего сигнала управления (например, заданного оператором положения тележки) высчитывает управляющий сигнал (например скважность ШИМ силового преобразователя) и подает его на исполнительное устройство (например на силовой преобразователь или подчиненную систему управления). Далее система управления ждет начала следующего такта. Это позволяет 1) Подчиненным устройствам отработать заданное управление. При этом затухают переходные процессы высоких порядков в исполнительных устройствах. 2) Обменяться данными с внешними управляющими системами. 3) Подчистить измеряемые сигналы, получить к началу следующего такта адекватную информацию о состоянии системы. 3) Посчитать сложную математику. Ну и четвертый эффект от дискретизации – это получении разрывного сигнала управления, позволяющего двигаться объекту управления по строго заданной фазовой траектории, то есть получить компромисс между релейным и непрерывным регулированием. Но об этом я еще напишу подробнее
[...] Раз ступенька, два ступенька<<Оглавление>>Элегантный компромисс с источником энергии Рубрика: Новости [...]
[…] Кибернетические качели <<Оглавление>>Раз ступенька, два ступенька […]