Архив рубрики «Новости»
Ликвидация ошибки и оптимальный закон торможения
При разработке различных систем, для более простого представления, обычно используют вел ичину, называемую «ошибкой регулирования» или просто «ошибкой». Эта величина определяет, насколько далеко объект управления отстоит от заданного состояния. В примере управления тележкой, эта величина будет обозначать то оставшееся расстояние, которое тележке осталось пройти, что бы попасть в заданное положение.
ичину, называемую «ошибкой регулирования» или просто «ошибкой». Эта величина определяет, насколько далеко объект управления отстоит от заданного состояния. В примере управления тележкой, эта величина будет обозначать то оставшееся расстояние, которое тележке осталось пройти, что бы попасть в заданное положение.
Таким образом, ошибка регулирования есть разность между заданной и настоящей координаты системы: 

Быстрее! Сильнее! Точнее! Эффективный и простой алгоритм управления.
В первую очередь рассмотрим простой алгоритм работы регулятора, когда сигнал управления может принимать только три значения +1(«вперед»), 0 – «стоп», -1 («назад»).
На заре кибернетики, когда ассортимент элементной базы был еще довольно скудным, подобный алгоритм управления было принято реализовывать при помощи электромагнитного преобразователя, который называли «реле». Поэтому подобные простые алгоритмы управления с тех времен принято называть «релейными».
Из чего состоит система управления.
Рассмотрим ФУНКЦИОНАЛЬНУЮ СХЕМУ нашей системы управления, которая представлена на рисунке 6, где показано из каких блоков состоит СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ и какие функции на эти блоки наложены.
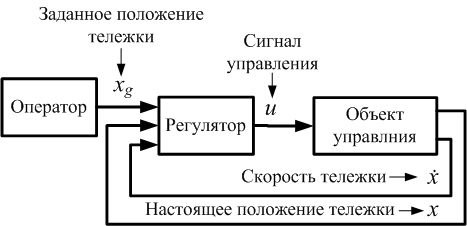
Рисунок 6. Функциональная схема типовой системы автоматического управления.
Лиха беда начало. Самый простой объект управления.
Сначала у меня было желание начать свое повествование с экскурса в теорию линейных систем автоматического управления. Вот я беру учебник, например «» и… Я представляю, как начинает рыдать над этим учебником третьекурсник, например, Военмеха. Сплошные формулы, обобщения, матрицы, модели чего такого и все это, как правило, накануне экзамена.
Конечно, мне очень нравиться эта стройная теория, я ее очень люблю, но не использую. Потому что для простых систем управления эта теория практически бесполезна. Я даже смею утверждать, что ее изучение, без предварительной экспериментальной подготовки вредна для юных неокрепших умов, так как вносит диссонанс между изучаемой теорией и наблюдаемой действительностью . Но это мое личное мнение.
Однако же с чего то начинать надо, поэтому вспоминаем седьмой класс школы по физике с того места, где встречается термин «материальная точка». Второй закон Ньютона как раз про нее. А что бы вспоминалось побыстрей решим следующую задачу - попробуем, например, разработать систему управления для тележки, снабженную приводом, который создает тягу- силу, которая может либо разгонять, либо тормозить тележку.
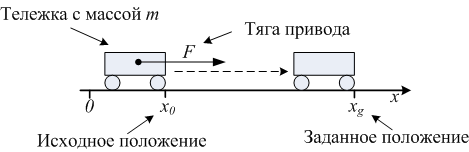
Рисунок 2. Иллюстрация к задаче автоматического управления тележкой
Вступление
Как говори тся, с почином меня любимого. Давно зрела идея завести свой тематический блог, однако, как любое хорошее дело откладывалось и откладывалось, пока не настал момент, “когда не писать уже невозможно”.
тся, с почином меня любимого. Давно зрела идея завести свой тематический блог, однако, как любое хорошее дело откладывалось и откладывалось, пока не настал момент, “когда не писать уже невозможно”.
Тематика пока только одна -это кибернетика. А так же все, что с ней связано – математика, механика, электроника, а еще медицина.
Так что добро пожаловать мои глубокоуважаемые читатели и возможно, даже, единомышленник, а еще лучше – коллеги.