Элементарная цифровая система управления на примере управления током двигателя постоянного тока . Часть 2. Метод быстрой настройка регулятора по “методу Юсупова”
Несколько слов об объекте управления. Очевидно, что он второго порядка (один порядок дает индуктивность, второй-фильтр). Пропорциональный коэффициент регулятора Kp я подобрал и он в пять раз меньше изначального варианта (когда не учитывался шум датчика)

Очень хочется для ОУ 2-ого порядка применить ПД регулятор, но в данном случае совершенно бессмысленно. На самом деле: вводя обратную связь по производной тока мы вытащим из сигнала (при дифференцировании) весь шум, от которого и так еле избавились.
Однако, перейдем к разработке регулятора по моему методу.
Два первых этапа мы уже выполнили, поэтому я их просто перечислю:
I) Выбор фильтра (подбор постоянной времени фильтра, у меня получилось 5T)
II) Подбор пропорционального коэффициента Kp.
Чем больше постоянная времени фильтра, тем меньше пульсации тока, но и меньше Kp. На что опереться в этом выборе. В реальной системе я опираюсь на издаваемый мотором шум. Если он на уровне шепота, то прекрасно- ваша машина работает в комфортных условиях. Экспериментируя с фильтром и регулятором довольно просто найти тот оптимум, когда и быстродействие приемлемое и машина не шумит. Что значит быстродействие приемлемое? Это значит, что переходный процесс завершается за такт внешней системы управления. В моем случае это 1мс.
Как правило, я придерживаюсь следующего алгоритма.
1) При постоянном сигнале управления я подбираю наименьшую постоянную времени фильтра но так, что бы измеренный сигнал под влиянием шума изменялся в пределах одной дискреты.
2) Далее подбираю пропорциональный коэффициент, так чтобы перерегулирование оставалось в приемлемом диапазоне (для контура тока это 5-10% , я позволяю себе 20%, а в некоторых случаях и 50%, но это отдельный разговор).
2) Далее подбираю пропорциональный коэффициент, так чтобы перерегулирование оставалось в приемлемом диапазоне (для контура тока это 5-10% , я позволяю себе 20%, а в некоторых случаях и 50%, но это отдельный разговор).
3) если быстродействие вас не устраивает, то снижайте постоянную времени фильтра, увеличивайте Kp и миритесь с увеличением шума, тут, как говорится, природу не обманешь.
Этап III
Преобразуем исходный регулятор в следующий вид. Добавим вторую обратную связь по току и снизим подобранный ранее коэффициент ровно в два раза (я специально выделил на схеме). Проверяем его работу.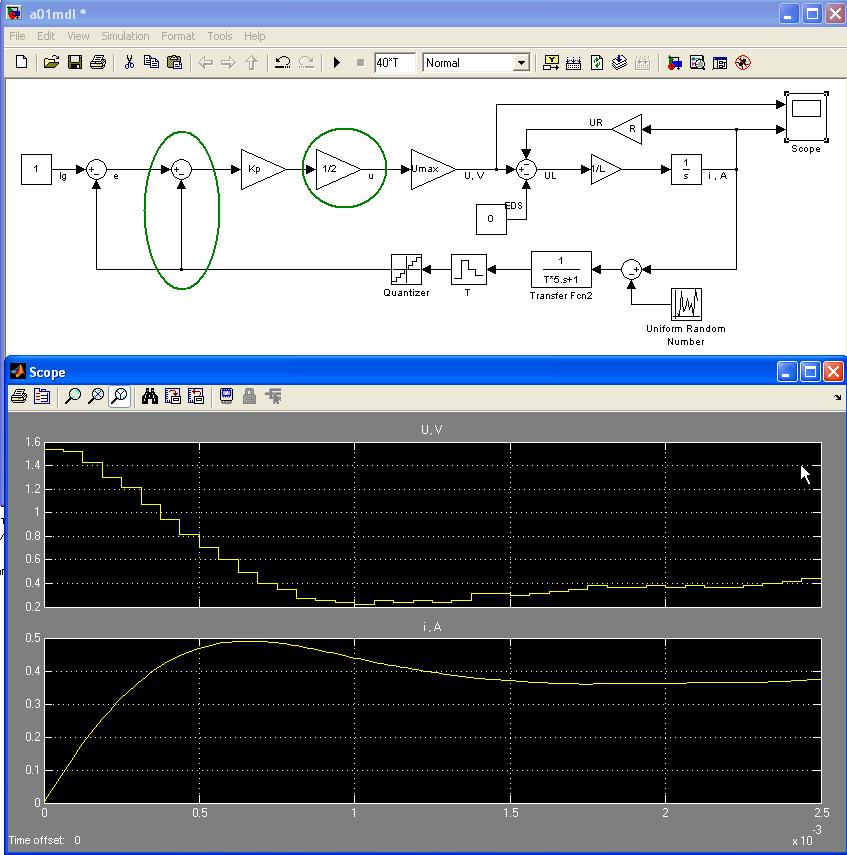
Преобразуем исходный регулятор в следующий вид. Добавим вторую обратную связь по току и снизим подобранный ранее коэффициент ровно в два раза (я специально выделил на схеме). Проверяем его работу.
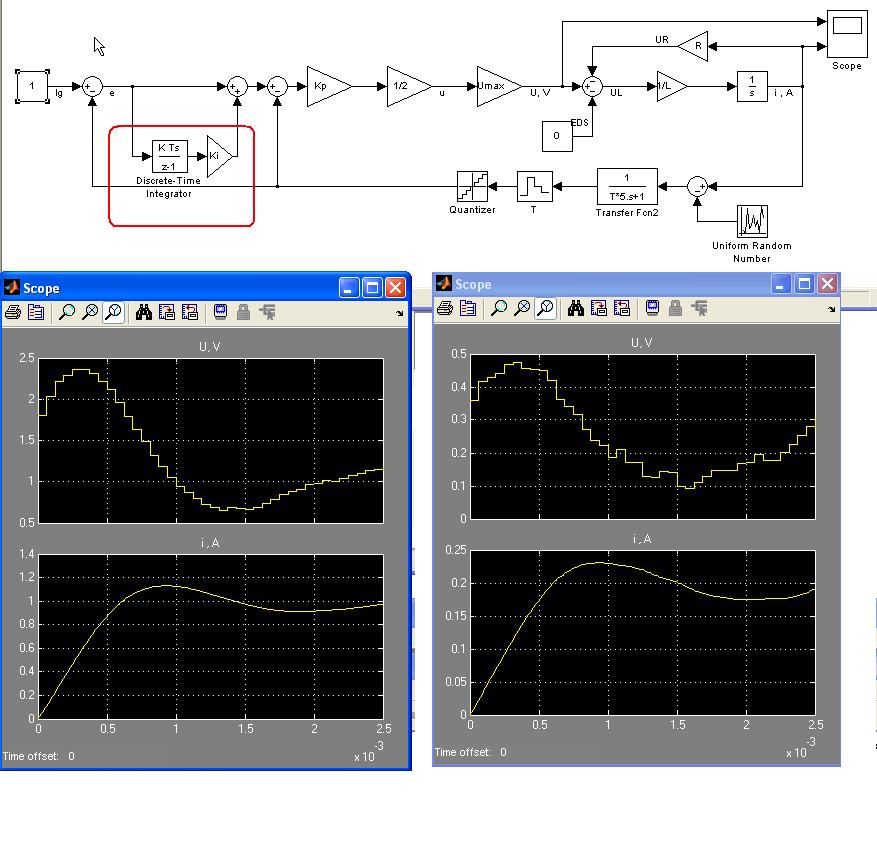
Система отработала заданный ток и при 1А и при 0,2 А. То есть, если опираться на максимальный ток 6А, то диапазон регулирования получился 30. Уже не плохо. Вот перерегулирование меня нервирует. Попробую снизить постоянную времени фильтра и заново провести подбор коэффициентов Kp и Ki
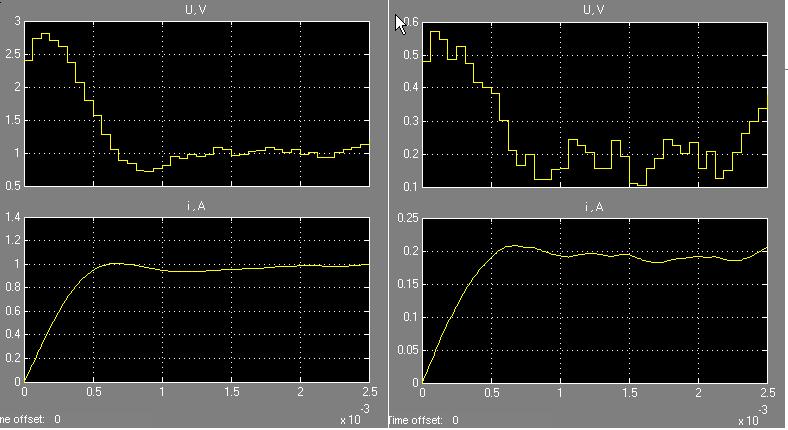
На удивление прокатило!
На удивление прокатило!
Заданные 1А и 0.2А отрабатываются за 0,5 мс, но при малых тока картинка сравнительно корявая.
Зададим теперь большой ток (6А) и большую противо-ЭДС (18В – машина раскручена на 75% от скорости холостого хода). Тут уже необходимо учитывать, что напряжение на двигателе не может быть какое угодно большое. Далее показаны переходные процессы, при которых этот факт не учитывается и учитывается:)
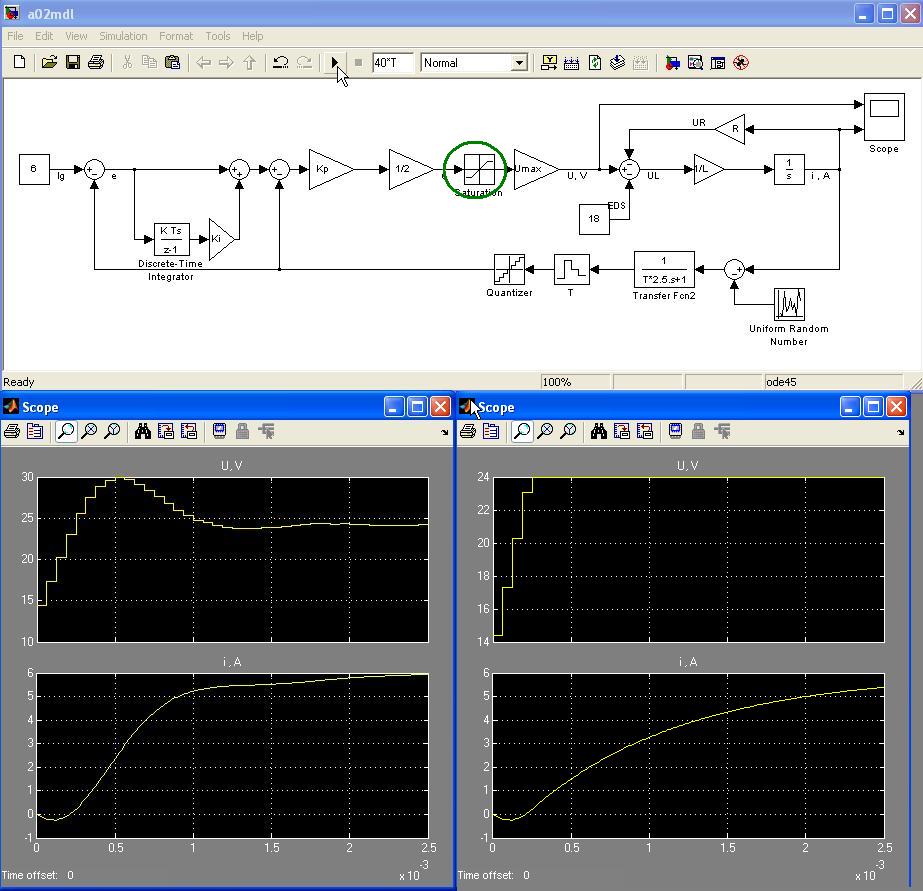
I) Подбор фильтра
II) Подбор Kp для обыкновенного пропорционального регулятора
III) Переходим к новой структуре с той же величиной Kp (деление на 2 я вынес отдельно!) и подбираем Ki. Все.
Заключение.
1) В борьбе за точность регулирования мы вынуждены терять в быстродействии и это фундаментальная проблема. Для того чтобы регулятор мог компенсировать внешние воздействия необходимо , что бы они себя проявили. А для того что бы они себя проявили нужно время. Тут природу не обманешь.
Заключение.
1) В борьбе за точность регулирования мы вынуждены терять в быстродействии и это фундаментальная проблема. Для того чтобы регулятор мог компенсировать внешние воздействия необходимо , что бы они себя проявили. А для того что бы они себя проявили нужно время. Тут природу не обманешь.
2) Полученный регулятор очень сильно похож на типовой пропорционально-интегральный (ПИ), кроме одной детали. Описанный выше регулятор- это ПИ+ еще одна обратная связь, которая все и решает. У меня, кстати, есть формальные доказательства его преимущества перед типовым ПИ.
3) Получилась же предлагаемая мной структура путем простых структурных преобразований адаптивной системы управления с астатической эталонной моделью и сигнальной самонастройкой. Эта система очень хорошо себя зарекомендовала во многих проектах. Я же лишь разработал (как мне кажется) очень изящный алгоритм ее экспериментальной настройки. Пользуйтесь на здоровье.
3) Получилась же предлагаемая мной структура путем простых структурных преобразований адаптивной системы управления с астатической эталонной моделью и сигнальной самонастройкой. Эта система очень хорошо себя зарекомендовала во многих проектах. Я же лишь разработал (как мне кажется) очень изящный алгоритм ее экспериментальной настройки. Пользуйтесь на здоровье.
Ваш А.Ю.
Здравствуйте.
А можете выложить саму модель, очень интересно посмотреть?