Элементарные цифровые регуляторы.
В первую очередь стоит упомянуть про пропорционально-интегральных (ПИ) регуляторы . Это очень простой простой способ управления и о нем написано очень много . Некоторые производители микроконтроллеров (например, FreeScale) в состав своих библиотек включают уже готовые, оптимизированные реализации ПИ – регуляторов. Сразу напишу почему не пишу про ПИД . Далее пойдет речь о системах, где дифференциальную составляющую невозможно толком измерить. Готовых решений навалом, ПИ-регулятор это очень просто и все его применяют.
Я ПИ регулятор не применяю. Я использую “адаптивный регулятор с астатической эталонной моделью и сигнальной самонастройкой”. Под этим страшным названием скрывается довольно простая структура. Про нее мне рассказал мой наставник, а ему немцы , когда приезжали к нам с визитом дружбы в Политех. Это было 20 лет назад. И 20 лет все используют ПИ, а я использую “адаптивный” регулятор. Самое удивительное, что “адаптивный” регулятор при детальном рассмотрении практически не чем не отличается от ПИ, кроме как наличием дополнительной обратной связи. Я путем простых структурных преобразований привел исходную структуру адаптивного регулятора к такой, чтобы это сходство показать. Теперь ни как не понять почему регулятор называется адаптивным, зато можно с ПИ сопоставить.
На рисунке показаны две модели системы управления, демонстрирующих пример управления током в двигателе.
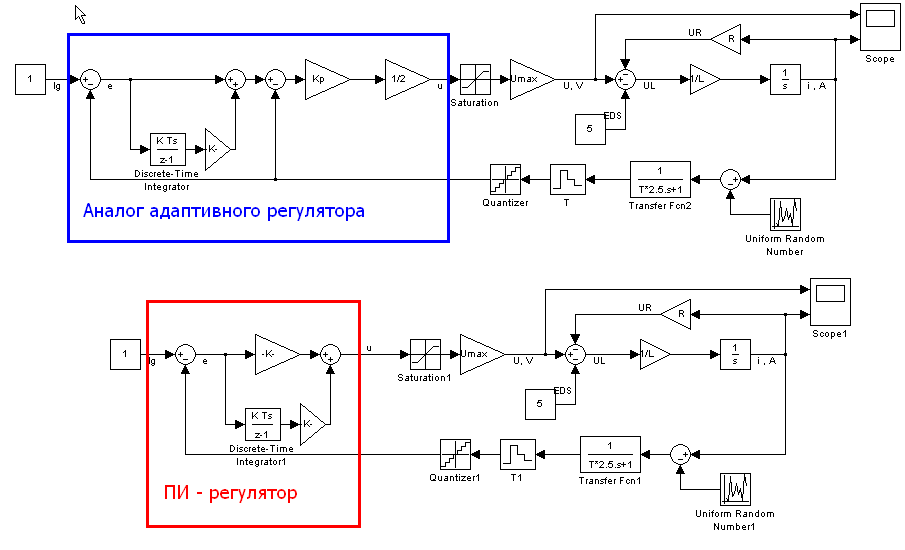
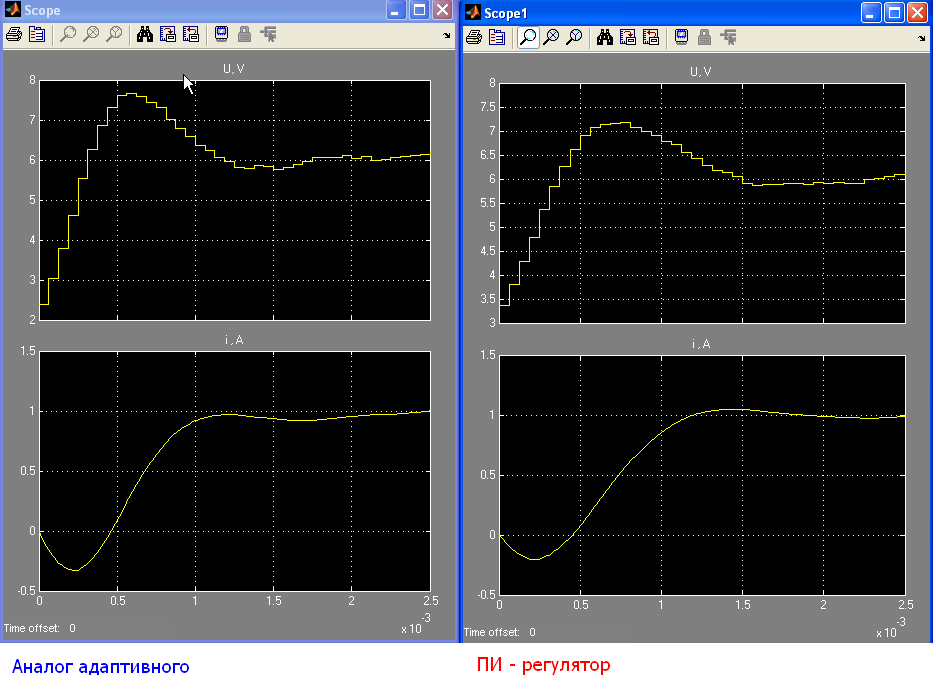
Я добросовестно отнесся к настройке и получил схожие результаты для обоих регуляторов, в случае, когда держать заданный ток мешает противо-ЭДС (подробности о модели ДПТ здесь).
А теперь убираем противо-ЭДС и получаем, что ПИ регулятор затянул ток на перерегулирование аж на 40% – раз в 5 больше, чем адаптивный. Объясняется это очень просто. Когда нагрузки нет, то и надобность в интегральной составляющей ПИ регулятора отсутствует- она только мешает. В адаптивном же регуляторе необходимость в интегральной составляющей есть всегда! Она ни когда не мешает, а только помогает. Поэтому и с нагрузкой и без нагрузки адаптивный регулятор работает замечательно.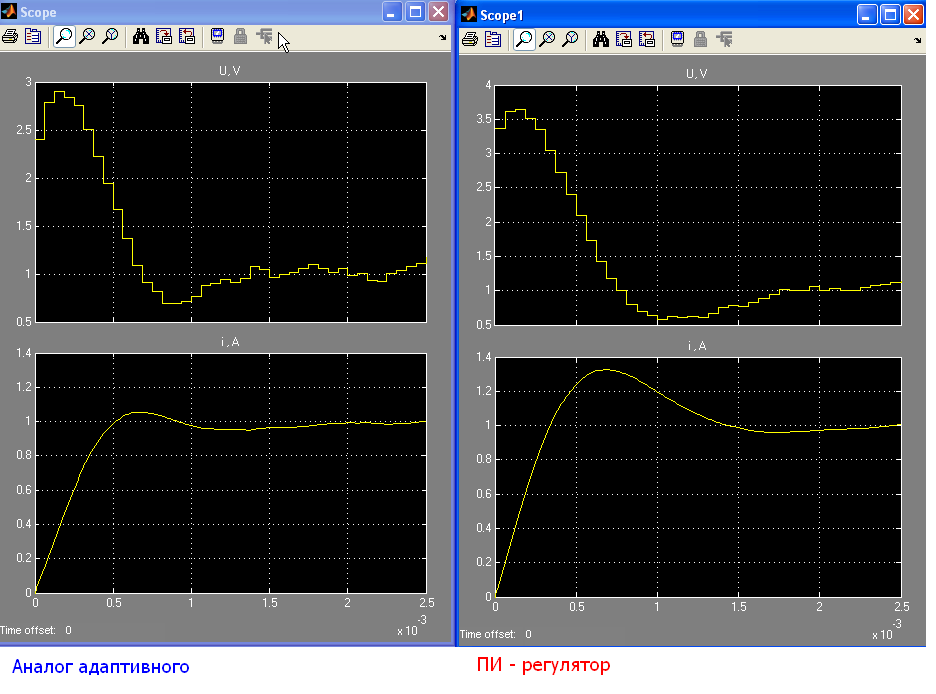
Со временем я придумал довольно простой способ экспериментальной настройки адаптивного регулятора и теперь предлагаю его на обсуждении общественности. У меня сейчас на настройку регулятора уходит 15 секунд. Но чтобы научится этому пришлось потрудится.
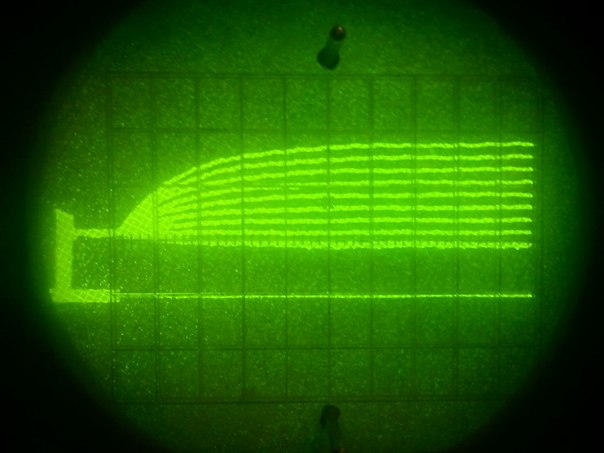
Кто бы поверил, что на получение таких картинок на экране осцилоскопа у меня уйдет 4 года.
Детали. На картинке – переходники тока в плазме . Температура порядка 10-40 тысяч градусов. Сталь испаряется и сияет. И через всю эту кухню аккуратно струятся электрончики. Довольно приятно чувствовать власть над машиной. Жаль, что 99,9% людей совершенно этим не интересуется.
А зря, плазма дико любопытная и загадочная субстанция. Развертка по x 5мс, по y – 50А. Выход на режим искусственно затянут из-за любви к искусству, для красоты. Вообщем получилось немерено круто (для тех кто понимает:) )
За кибернетиков!
И принцесса от злости повесилась на собственной косе, потому что он совершенно точно сосчитал сколько зерен в мешке, сколько капель в море, и сколько звезд на небе.
Так выпьем же за кибернетиков!