Элегантный компромисс с источником энергии. Широтно-импульсная модуляция (ШИМ).
 В кибернетике меня больше всего занимают систем управления электрическими моторами. Вот по душе мне это дело. Как, впрочем, и все инженерное ремесло, но электропривод – особенно. Пожалуй, каждый разработчик электроприводов сталкивался с проблемой передачи энергии от источника питания к мотору. Вот допустим, нам необходимо регулировать скорость вращения двигателя, а для этого надо подавать на него разное напряжение. То есть необходим управляемый источник напряжения. Однако, источник энергии у нас – это либо аккумулятор, либо электросеть с выпрямителем – источники постоянного напряжения.
В кибернетике меня больше всего занимают систем управления электрическими моторами. Вот по душе мне это дело. Как, впрочем, и все инженерное ремесло, но электропривод – особенно. Пожалуй, каждый разработчик электроприводов сталкивался с проблемой передачи энергии от источника питания к мотору. Вот допустим, нам необходимо регулировать скорость вращения двигателя, а для этого надо подавать на него разное напряжение. То есть необходим управляемый источник напряжения. Однако, источник энергии у нас – это либо аккумулятор, либо электросеть с выпрямителем – источники постоянного напряжения.
Вообще существуют непрерывные «линейные» источник питания, но все они работают сродни реостату – чтобы понизить потребляемую мощность двигателя, лишнюю энергию источника питания рассеивают в тепло. И этому, не пригодному для нас подходу, существует только одна альтернатива – силовые ключи. Эти электротехнические изделия имеют только два состояния: «включен» – электрическая цепь замкнута и «выключен» – электрическая цепь разомкнута. На базе четырех таких ключей можно собрать «мост», который имеет уже 3 состояния – «максимальное положительное напряжения», «максимальное отрицательное напряжение» и «ноль напряжения». Есть еще четвертое состояние – «короткое замыкание». Но оно уже не штатное, использовать его мы не будем, но помнить о нем необходимо всегда. Это и есть реализация «реле».
а) 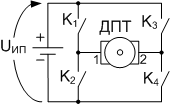 б)
б)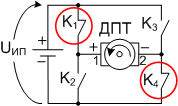 с)
с)
Рисунок 1. Силовой преобразователь. a) на двигатель не подается напряжение; б) “прямое” включение : “плюс” источника приходит на 1-ый контакт двигателя, “минус” – на 2-ой; двигатель вращается в положительном направлении. c) “противключение”: на 1-ый контакт двигателя приходит “минус”, на второй – “плюс”; двигатель вращается в обратном направлении. На рисунке обозначено: ДПТ – двигатель постоянного тока, Uип – напряжение источника питания. K1, K2, K3, K4 – силовые ключи.
В самом простом виде этот силовой преобразователь представлен на рисунке 1. Под пунктом “a2 показано состояние преобразователя, когда все ключи разомкнуты и двигатель отсоединен от источника питания. Под пунктом “б” показано состояние преобразователя, когда у него замкнуты ключи K1 и K4. Это назовем “прямым” подключением: “плюс” источника приходит на 1-ый контакт двигателя, “минус” – на 2-ой. В этом случае ротор двигателя начинает вращаться в одну сторону. Но если включить ключи К2 и К3, как это показано на том же рисунке под пунктом “с”, то двигатель начнет вращаться в другую сторону, потому что “плюс” источника уже приходит на 2-ой контакт, а “минус” на первый. Это называют “обратным включением” или “противовключением”.
Таким образом, разработчики электропривода всегда имеют дело с релейными системами. Мы уже рассмотрели два режима работы релейной системы – скользящий и автоколебательный.
Скользящий режим хорош своей возможностью заставить объект управления пройти по точно заданной фазовой траектории, но он всегда сопровождается переключениями реле с максимально большой частотой. Этот режим для силовых ключей является крайне не комфортным, так как при каждом выключении на самом ключе выделяется некоторое количество тепла. Природа этого явления проста: силовой ключ физически не в состоянии мгновенно разорвать электрическую цепь. В какой-то момент времени, когда он еще «полуоткрыт», ток через него течет, а вот сопротивление уже большое. Из школьной физики известно, что энергия, выделенная в тепло, будет равна квадрату тока на сопротивление «полуоткрытого» ключа и умноженное на время его закрытия. Поэтому в скользящем режиме практически вся электрическая энергия будет уходить в тепло.
Дискретная системы управления занижает частоту переключений, однако в области малых ошибок она обязательно выпадает в автоколебания. Вот тут и пришел на помощь замечательный способ управления реле – широтно-импульсная модуляция, сокращенно ШИМ, или на английском PWM. Идея его очень простая – дискретная система управления включает реле не на весь период дискретизации, а только на некоторую его часть, как это показано на рисунке 2. То есть, на каждом периоде квантования формируется импульс напряжения определенной длительности. Так вот, реакция электрического двигателя на серию таких импульсов будет такая, как будто бы на двигатель непрерывно подавалось напряжение, пропорциональное длине этого импульса. Чем длиннее импульс, тем больше энергии будет передано от источника к мотору. Другими словами, напряжение на двигателе, сформированное по способу ШИМ, становиться эквивалентным непрерывному напряжению с амплитудой, пропорциональной времени включения реле. Правда для совсем коротких импульсов (менее 10% от периода квантования) из-за тонкостей реализации вышесказанное может оказаться не верным, но про это пока рано задумываться. Самое главное, что в дискретных системах можно заставить работать реле так, как будто бы существует регулируемый источник энергии с непрерывной характеристикой и это нам на руку, потому что математика значительно упрощается, об этом в следующем разделе.
Подробнее про реализацию ШИМ здесь.

Рисунок 2. Пример широтно-имульсной модуляции. На рисунке обозначено: To – период квантования преобразователя; Tи – длина импульса; Uсп – напряжение, передаваемое силовым преобразователем на нагрузку; Uэкв – эквивалентное непрерывное напряжение, при котором электрический двигатель будет работать также, как при ШИМ
[...] [...]