Как ее убить. Работа релейного управления в скользящем режиме.
 Если ваше изделие надоело вам окончательно, то заставьте систему управления работать в так называемом «скользящем режиме». Полный разгром всех элементов конструкции электропривода вам обеспечен. Часто требуется немного времени, рука не успевает нажать волшебную кнопку «СТОП», ваше детище начинает бросаться осколками шестеренок и остатками плавящейся проводки.
Если ваше изделие надоело вам окончательно, то заставьте систему управления работать в так называемом «скользящем режиме». Полный разгром всех элементов конструкции электропривода вам обеспечен. Часто требуется немного времени, рука не успевает нажать волшебную кнопку «СТОП», ваше детище начинает бросаться осколками шестеренок и остатками плавящейся проводки.
Я, конечно, несколько преувеличил, но кто из вас любит ходить к зубному? Я, вот, очень сильно не люблю. Из-за брутального дискомфорта, возникающего при виде бор-машины. Так вот, вся конструкция электропривода в скользящем режиме испытывает именно такие чувства со всеми вытекающими зубодробительными последствиями. И особенно трудно передать впечатление от душе-раздирательного скрежета, издаваемого каждой шестеренкой, зазором, сочленением. Впрочем, посмотрите видеозапись и убедитесь сами.
Природу скользящего режима хорошо демонстрирует фазовый портрет, показанный на рисунке 1. Заданная фазовая траектория, на которую ориентируется регулятор, по отношению к оптимальной фазовой траектории, более полога. Надеюсь, вы еще не забыли, как работает релейный алгоритм. Впрочем, напомню: если объект управления находится выше заданной фазовой траектории, то включается положительная максимальная тяга привода, а если ниже – то отрицательная. Теперь мысленно представьте себе, что произойдет, если объект управления попадает в нижнюю область. Тяга при этом переключается на обратную, и внимание! объект управления снова пересекает заданную фазовую траекторию и оказывается в верхней области – управление снова переключается на противоположное. Другими словами, пересекая фазовую траекторию, как это показано на рисунке 2, объект управления тут же попадает в условия, заставляющие его, немедленно вернутся назад. По этой причине объект управления намертво привязан к заданной фазовой траектории и обязательно, со временем, оказывается в нуле ошибки и ее производной. То, что, собственно нам и надо – цель достигнута. Однако, обратите внимание, какой же безобразный сигнал управления: постоянные переключения тяги привода происходит с максимально возможной частотой. Такие переключения, без всякого сомнения, убийственны для любого электротехнического изделия.
Тут я хочу задать вам вопрос. По какому закону динамики будет двигаться объект управления, загнанный в столь жесткий режим? Вы, наверное, уже догадались – так как фазовая траектория движения объекта управления с точностью повторяет заданную фазовую траекторию, то для любого момента времени будет справедливо:
,
где определяет наклон заданной фазовой траектории. Если
больше, чем
, то система управления будет работать в скользящем режиме. Собственно это и есть уравнение динамики системы. Согласитесь, прелюбопытный эффект! В скользящем режиме объект управления двигается так, как будто бы он потерял один порядок; его движение наблюдаемо и прогнозируемо и гарантировано стремится к нулю ошибки и ее производной. Мы к этому нюансу еще вернемся, а пока изучите переходные процессы, представленные на рисунках 3,4,5. Сравните их с данными предыдущего раздела.
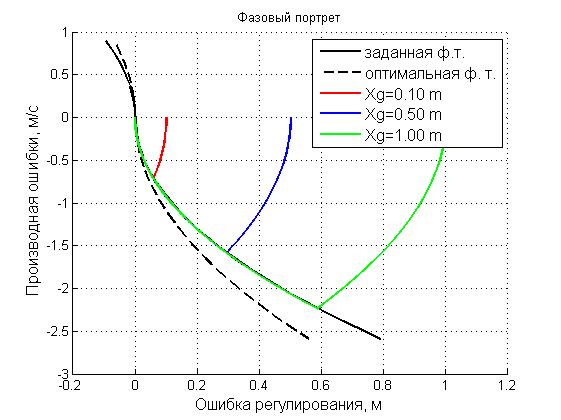
Рисунок 1. Фазовый портрет при скользящем режиме.
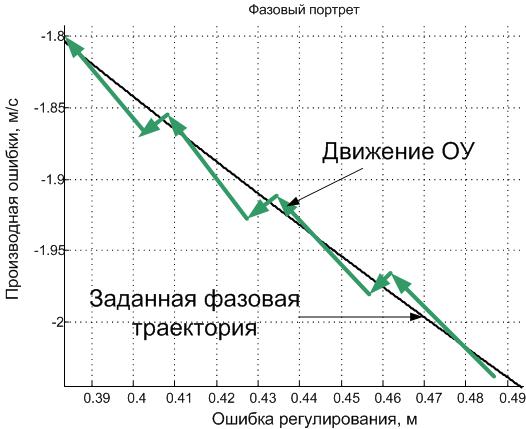
Рисунок 2. Движение объекта управления в фазовом пространстве при скользящем режиме
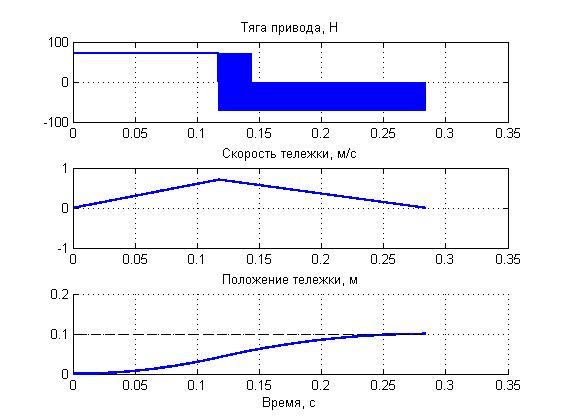
Рисунок 3. Переходные процессы в приводе в скользящем режиме и при заданном положении 0.1 м.
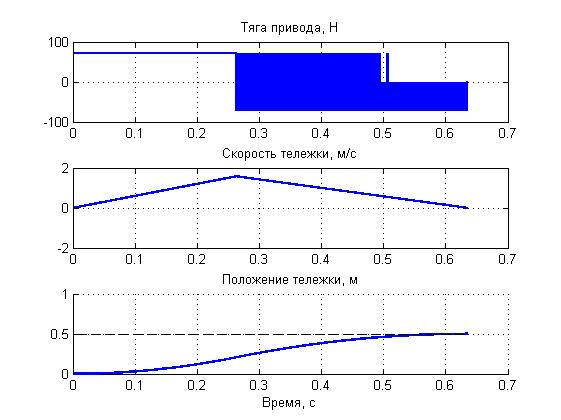
Рисунок 4. Переходные процессы в приводе в скользящем режиме и при заданном положении 0.5 м.
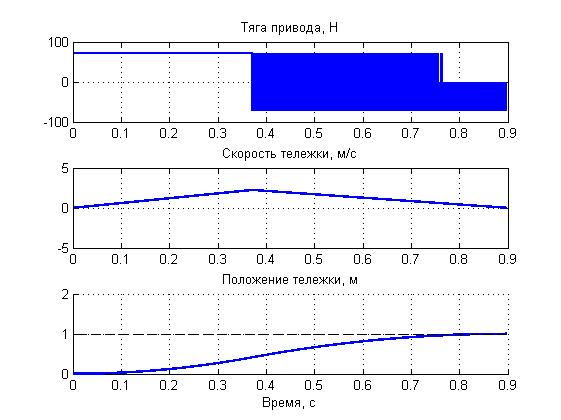
Рисунок 5. Переходные процессы в приводе в скользящем режиме и при заданном положении 1 м.
Кибернетические качели <<Оглавление>>Раз ступенька, два ступенька
[…] Как ее убить<<Оглавление>>Semper in moto […]
[…] MATLAB за Simulink. Самая простая модель системы управления Как ее убить. Работа релейного управления в скользящем… […]